

Mi nombre es Hernán Bravo, vivo en la Patagonia Argentina y soy el creador de esta web llamada GameDevTraum y sus canales de YouTube homónimos.
Actualmente soy creador de contenido relacionado al manejo de Blender, Unity y programación. Trabajo en proyectos en Unity como desarrollador freelance y continúo capacitándome y experimentando con estas herramientas.
Experiencia en el manejo del motor Unity y Blender: 9 años y contando
Formación Académica
Ingeniería Electrónica - Universidad Nacional del Comahue, Argentina (2009-2014)
Asignaturas relevantes completadas:
Álgebra I y II; Análisis Matemático I, II, III y IV; Física I, II, III y IV; Métodos Numéricos; Electrónica I y II; Probabilidad y Estadística.
Licenciatura en Ciencias de la Computación - Universidad Nacional del Comahue, Argentina (2014-2016)
Asignaturas relevantes completadas:
Resolución de problemas y algoritmos; Desarrollo de Algoritmos; Programación Orientada a Objetos; Programación Concurrente.
Goethe-Zertifikat A1 Start Deutsch 1 (16/09/2016)
Goethe-Zertifikat A2 (20/10/2017)
SECCIONES DE ESTE PORTFOLIO
PROYECTOS COMO DESARROLLADOR FREELANCE
Banderillero y monitor de siembra satelital - Efe y Efe Ingeniería
Asistencia en el desarrollo de aplicación para registrar el recorrido de un vehículo a través de coordenadas GPS. Sistema de posicionamiento. Registro de hectáreas trabajadas. Trazado de líneas guía rectas y curvas.
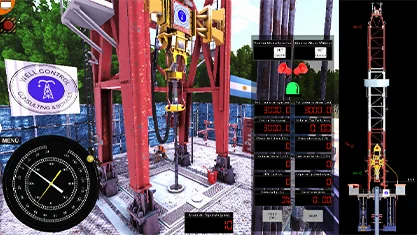
Patagonian 1 Drilling & Well Control Simulator
Desarrollo íntegro desde cero de una aplicación para la simulación de ejercicios de perforación y control de pozo.
VR Hotel Applications
Desarrollo de un conjunto de aplicaciones para la Oculus Store, estas aplicaciones permiten la visualización en realidad virtual de habitaciones y alrededores de distintos hoteles de España.
ASESORÍAS EN TESIS DE GRADO
Sistema de guardado multithreading para imágenes procesadas con OpenCV en Android Studio
Universidad Nacional del Comahue, Argentina
INGENIERÍA ELECTRÓNICA
Año 2017
TAREAS REALIZADAS
- Creación de estructura de datos y sistema de guardado en memoria persistente de un dispositivo Android.
- Implementación de algoritmo multi-threading para guardar los datos fuera del hilo principal para que la aplicación no se congele durante el guardado.
Generación de trayectorias del brazo robótico Mitsubishi RV-2SDB en Unity
Universidad de las Fuerzas Armadas ESPE sede Latacunga, Ecuador
INGENIERÍA MECATRÓNICA
Año 2021
Diseño e implementación de un sistema de operación off-line del brazo robótico Mitsubishi RV-2SDB a través de realidad virtual no inmersiva para contribuir en el proceso de aprendizaje de robótica industrial en el laboratorio de Mecatrónica de la Universidad de las Fuerzas Armadas ESPE sede Latacunga, Ecuador.
TAREAS REALIZADAS
- Adaptación del algoritmo de control del brazo robotico por cinemática directa y cinemática inversa hecho en MATLAB a Unity en lenguaje C#.
- Gizmos de control del posicionamiento y orientación de cada grado de libertad.
- Adaptación del cotrolador de la consola Wii como alternativa para posicionar el brazo.
- Modelos matemáticos para el trazado de trayectorias.
- Generación y exportacion de código de trayectorias para importar en el software de control del brazo Mitsubishi RV-2SDB.
Sistema de control de tres grados de libertad de un satélite en Unity
Universidad de las Fuerzas Armadas ESPE sede Latacunga, Ecuador
INGENIERÍA MECATRÓNICA
Año 2022
TAREAS REALIZADAS
- Desarrollo del entorno 3D.
- Implementación del modelo de control.
- Adaptación del algoritmo de control hecho en MATLAB para la orientación de los paneles solares del satélite a lenguaje C# en Unity.
- Representación gráfica de la orientación de los paneles solares.
Mapa interactivo del campus universitario
Universidad de Tarapacá, Chile
Año 2023
TAREAS REALIZADAS
- Establecer buenas prácticas para estructurar un modelo 3D hecho en Maya con el fin de utilizarlo en Unity.
- Creación de una estructura de datos para organizar la información relacionada a edificios de la universidad.
- Script para configurar modelos 3D en tiempo de ejecución.
- Sistema para detección de clics y determinar el modelo 3D sobre el que está posado el cursor.
- Ventana de interfaz gráfica que muestra la información del edificio seleccionado.
- Cartel de información que muestra el nombre de un edificio al posar el cursor unos segundos sobre él.
- Movimiento vertical y horizontal de la cámara sobre el mapa con límites definidos.
JUEGOS HECHOS EN 48 Y 72 HORAS








MODELADO 3D
Árbol de producción para operaciones de Workover en el simulador de control de pozo
- Modelo 3D hecho a escala.
- Optimizado para motores gráficos.
- Mapeado UV.
- Texturas en Substance Painter.
- Blender Custom properties.
- Implementación en Unity.
OTROS PROYECTOS
Generador de Sitemap de vídeos para el sitio GameDevTraum
Para resolver este problema decidí crear una herramienta web personalizada usando Unity y las API’s de mi sitio web y de YouTube.
La herramienta funciona en distintas etapas.
En primer lugar se comunica con la API de mi sitio web para obtener los metadatos de todos los artículos, al momento de escribir esto hay unas 501 URLs, de modo que en esta primera etapa contamos con una lista de 501 objetos con la información de estos artículos.
El siguiente paso es analizar cada una de las URLs obtenidas y solicitar a la API el contenido de cada artículo, este contenido se analiza en busca de vídeos embebidos en el artículo, un artículo puede no tener vídeos o tener uno o más, de modo que al finalizar esta etapa tenemos una lista con los artículos que tienen vídeo y un array con las IDs de los vídeos embebidos.
En la siguiente etapa se analizan cada uno de los vídeos de la lista anterior pero esta vez se llama a la API de YouTube para obtener los metadatos de todos los vídeos.
Finalmente con toda la información recolectada se genera un Sitemap en lenguaje XML que contiene información para que las arañas de Google puedan indexar los vídeos.
El resultado es este archivo XML de 22446 líneas que añado a la herramienta Search Console para que se tomen en cuenta estos vídeos para su indexación.
Actividad en YouTube
COMPARTIENDO CONOCIMIENTO Y RESOLVIENDO PROBLEMAS
CANAL EN ESPAÑOL
- 393 Vídeos
- 10.2K Suscriptores
- 47K Visualizaciones mensuales
- 2.8M Visualizaciones totales
VÍDEO DE EJEMPLO
CANAL EN INGLÉS
- 178 Vídeos
- 2.3K Suscriptores
- 59K Visualizaciones mensuales
- 1M Visualizaciones totales
VÍDEO DE EJEMPLO
CANAL EN ALEMÁN
- 14 Vídeos
- 102 Suscriptores
- 300 Visualizaciones mensuales
- 5.3K Visualizaciones totales