







Un divisor de voltaje resistivo es un arreglo de dos resistencias en serie que nos permite tener en el punto medio una fracción del voltaje en los extremos.
El divisor con potenciómetro se suele usar como entrada analógica en los variadores de frecuencia de los motores. Utilizando el potenciómetro cambiamos la velocidad del motor.
También se puede polarizar un transistor BJT con un divisor, conectando el punto central de este a la base del transistor.
En la figura 1 vemos un arreglo que puede ser usado como un divisor.
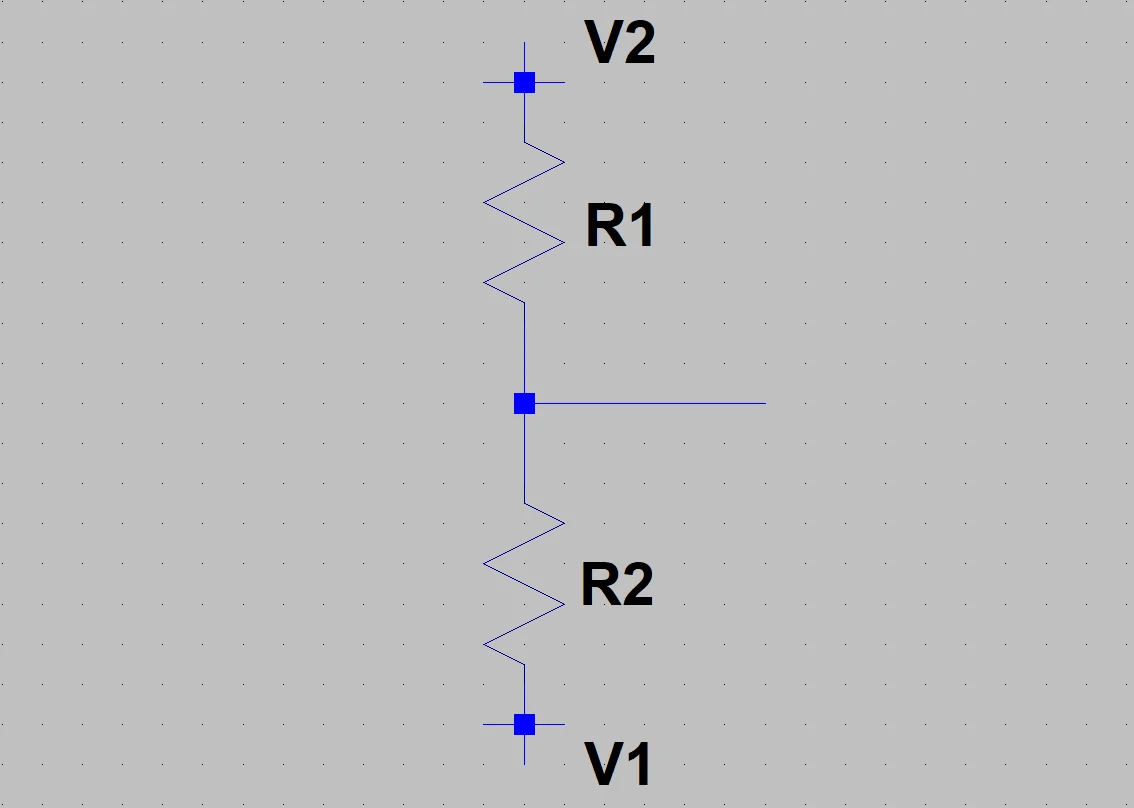
Para entender cómo funciona debemos considerar las caídas de potencial en ambas resistencias.
El voltaje que cae en una resistencia es la corriente que circula por ella multiplicada por el valor resistivo.
Para ver cómo funciona un divisor resistivo vamos a hacer una simulación utilizando LT Spice. Si necesitás ayuda para empezar con LT Spice entrá en este artículo donde explico cómo instalarlo y hago un circuito simple para simular.
En el siguiente video puedes ver el proceso de instalación y el diseño y simulación de un circuito con resistencias serie y fuente de voltaje continuo.

Vamos a analizar dos casos, cuando las resistencias son iguales y cuando una es mayor o menor que otra.
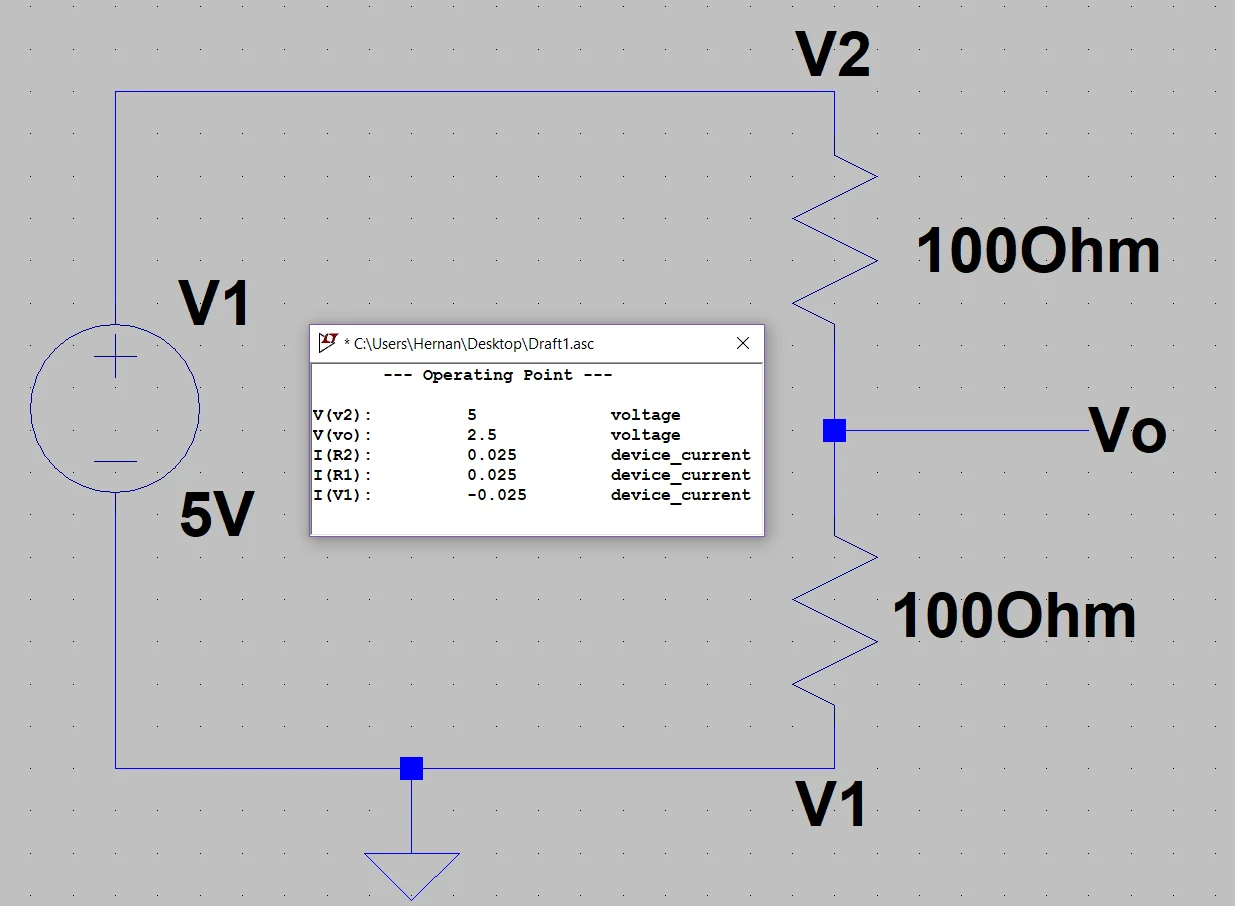
En este caso podemos intuir que la caída de potencial en ambas resistencias será la misma (debido a que circula la misma corriente a través de ellas y su valor resistivo es igual), por lo tanto en el punto medio del divisor tendremos un valor de voltaje igual al valor medio entre la diferencia de potencial en los extremos.
En la figura 2 podemos ver que el voltaje en Vo es 2.5 Volts, la mitad de los 5 Volts aplicados en el divisor.
Con este resultado podemos estar tentados a decir que el voltaje en el punto medio del divisor va a ser igual a la mitad del valor aplicado en V2, pero esto no siempre es así.
Esto sólo se cumple si en V1 tenemos aplicados 0 Volts (en la figura 2 V1 está a tierra).
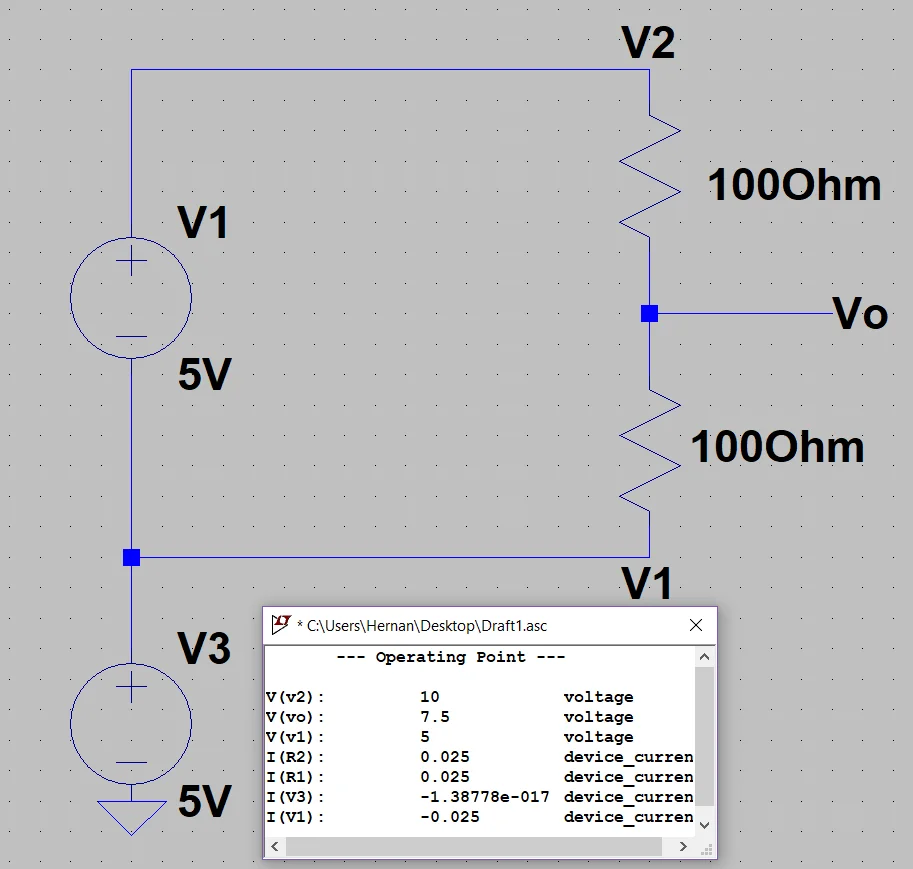
En la figura 3 vemos un ejemplo en el que esto no se cumple, en este caso la diferencia de potencial en el divisor sigue siendo 5 Volts, pero V1 no se encuentra a tierra sino que tiene aplicado 5 Volts mientras que V2 tiene 10 Volts.
El resultado es que en Vo tenemos la mitad de la diferencia de potencial aplicada más el voltaje V1.
En la figura 4 consideramos R1 más pequeña que R2 y en la figura 5 el caso contrario.
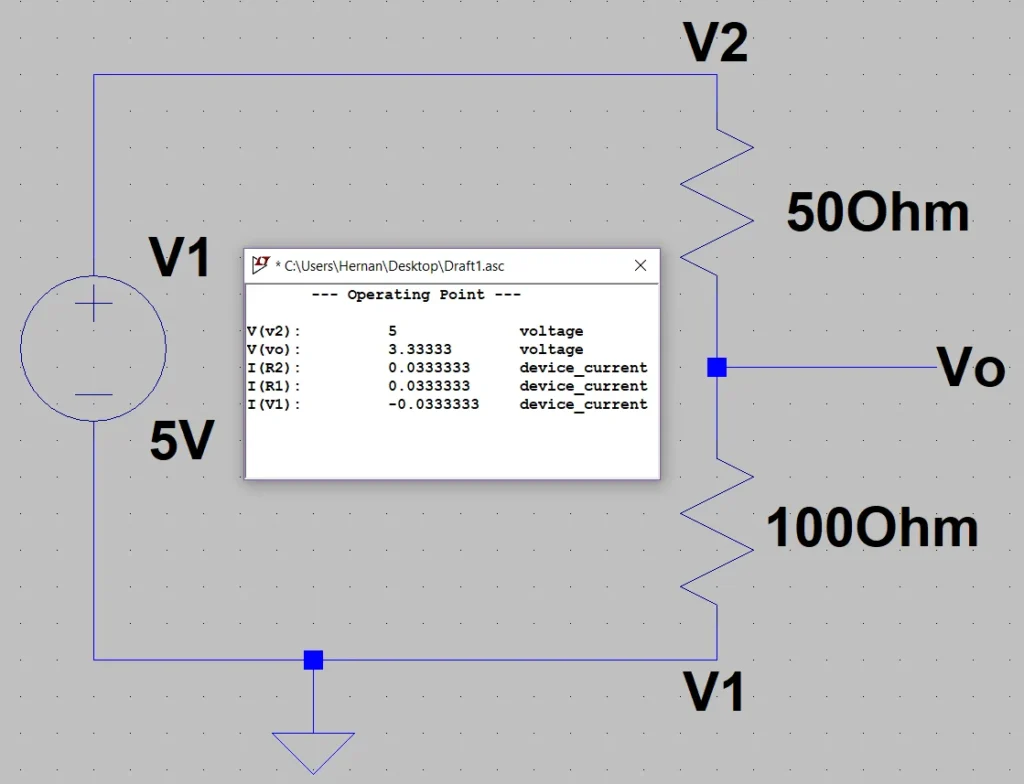
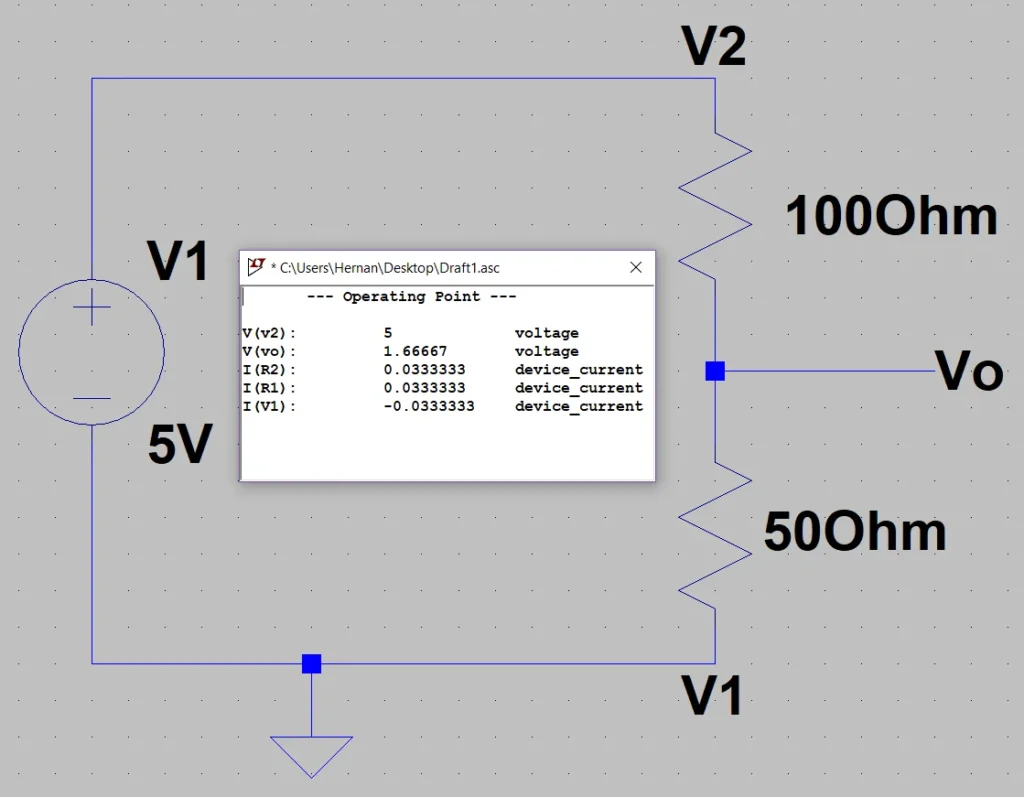
Basándonos en los resultados podemos decir que si el 100% del valor resistivo es 150 Ohms, 50 Ohms y 100 Ohms serán aproximadamente el 33% y 66% respectivamente.
Estos porcentajes parecen verse reflejados en la tensión Vo, ya que en la figura 4 la tensión 3.3 V es aproximadamente el 66% de 5 V mientras que 1.6 V es aproximadamente el 33% de 5V.
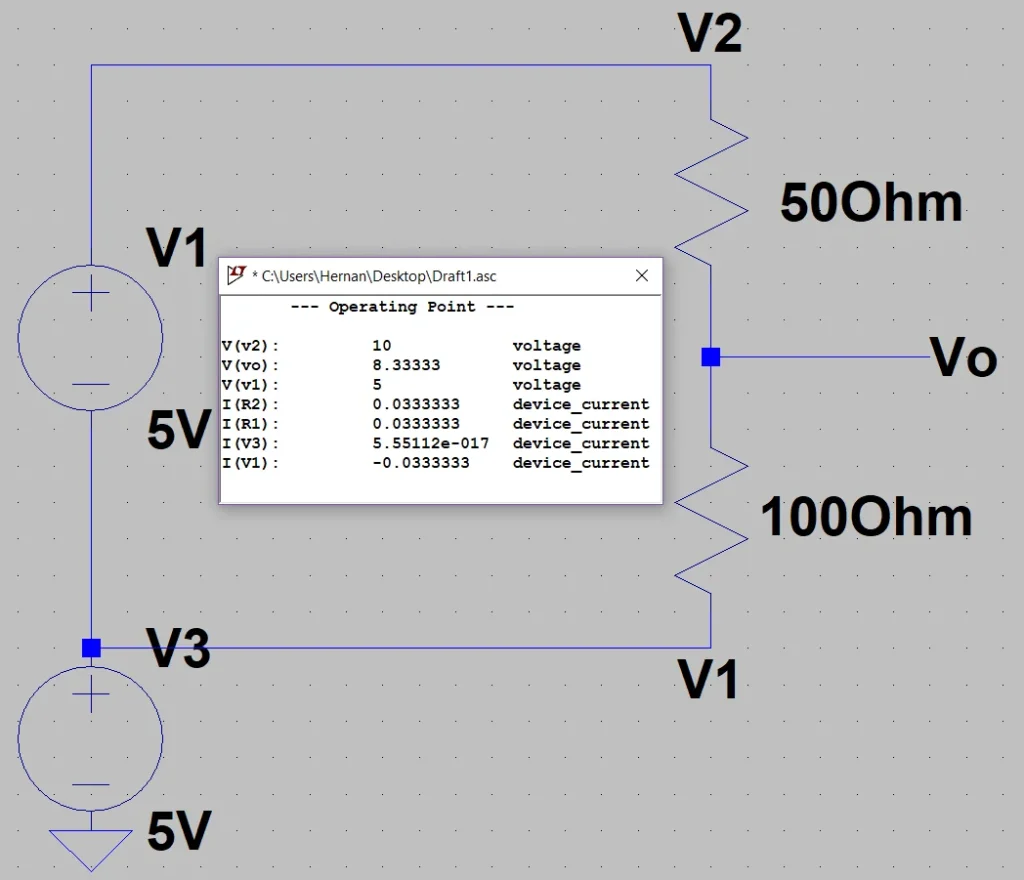
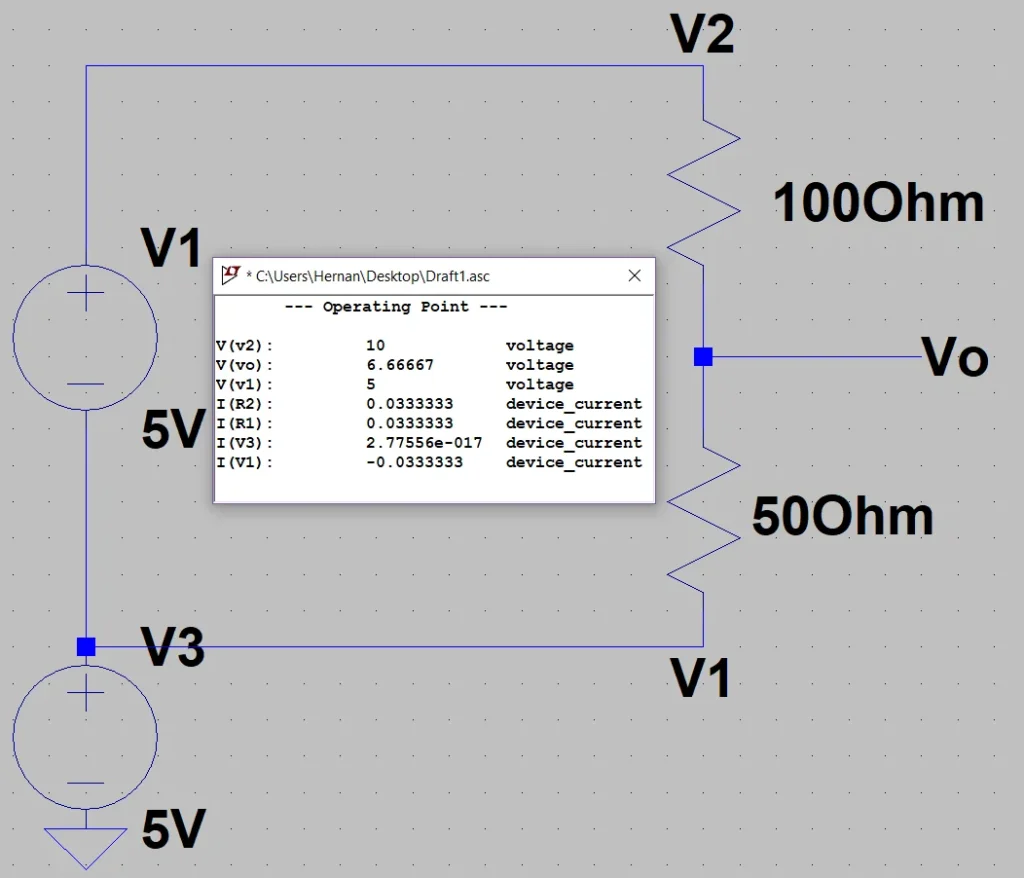
Análogamente a la figura 3, no debemos asumir que esto será siempre así, hay que recordar sumar la tensión aplicada en V1, esto podemos comprobarlo en las figuras 6 y 7.
Ahora que hemos visto el principio de funcionamiento y algunos experimentos vamos a encontrar una expresión para el voltaje Vo que tenga en cuenta ambas resistencias.
El voltaje Vo va a ser igual al voltaje V1 más la caída de potencial en la resistencia 2.
Vo = V1 + Vr2
La caída de potencial en R2 es igual a la corriente que circula por la resistencia multiplicada por el valor de R2.
Vr2 = i x R2
Entonces:
Vo = V1 + i x R2
La corriente que circula por el divisor, por Ley de Ohm, es igual a la diferencia de potencial aplicada en los extremos dividido la suma de las resistencias.
i = ( V2 – V1 ) / ( R1 + R2 )
Reemplazando la corriente en la expresión anterior tenemos:
Vo = V1 + R2 x ( V2 – V1 ) / ( R1 + R2 )
Aquí ya tenemos una expresión para Vo en la que están todas las variables de la figura 1, sin embargo podemos resolver la suma y obtener una expresión más compacta.
Vo = ( R1 x V1 + R2 x V2) / ( R1 + R2 )
Este elemento se puede usar como un divisor resistivo variable.
El potenciómetro básicamente son dos resistencias que podemos cambiar de valor pero la suma de ambas permanece invariable.
Si en los extremos conectamos una diferencia de potencial, en el medio tendremos un voltaje que estará entre el voltaje mínimo y el máximo de esa diferencia de potencial.
Utilizando la perilla podremos controlar el voltaje en la pata central.
Hemos visto qué es un divisor resistivo y cuál es su principio de funcionamiento.
Algunas aplicaciones pueden ser para ingresar valores en entradas analógicas de distintos aparatos de control como variadores de frecuencia o controladores lógicos. Polarizar transistores.
En esta entrada voy a mostrar una simulación industrial que hice hace un tiempo intentando combinar la automatización con PLC y el entorno gráfico Unity.
El experimento consiste en la simulación de una línea de pulpa hecha con el motor gráfico Unity, la idea es similar al SCADA (sistema de control y adquisición de datos) sólo que en este caso sólo observamos los estados de las máquinas, no se hace control.
Los modelos 3D de las máquinas fueron hechos con Blender y posteriormente se animaron con programación en Unity.
En la simulación las máquinas se pueden activar y desactivar, la idea es que estas máquinas sean controladas con la información que se recibe del Arduino por puerto USB.
La idea es controlar variables en Unity utilizando un Arduino que se encarga de leer los estados de las salidas del PLC y con eso elaborar una palabra que se envía por USB a la PC y desde Unity se interpreta esa palabra y se aplican los cambios correspondientes.
En el siguiente video perteneciente al canal de mi otra página muestro el resultado de la simulación.

Los problemas de sincronización que se ven en el video ya fueron solucionados utilizando programación multihilos. Probablemente haga un artículo para mostrar cómo quedó la versión final que se usó para simular el funcionamiento de una cámara frigorífica.
Esta simulación industrial fue el pie para un trabajo en el que se utilizó un PLC para controlar un proceso que involucra sensores de temperatura y variadores de velocidad para controlar el giro de unos ventiladores.
Con Arduino se hace la lectura de los estados de las salidas digitales del PLC y de la salida analógica para controlar la velocidad de los ventiladores y esto se envía en una palabra de 6 caracteres.
En Unity se toma esta palabra de 6 caracteres y se interpreta cuál es el estado de las salidas digitales y qué valor está saliendo en el puerto analógico y la simulación se ajusta a estos valores.
En este artículo vamos a deducir cómo calcular el valor resistivo resultante al colocar resistencias en paralelo, es decir conectar dos o más resistencias con sus patas interconectadas. Además vamos a utilizar LT Spice para verificar estos resultados.
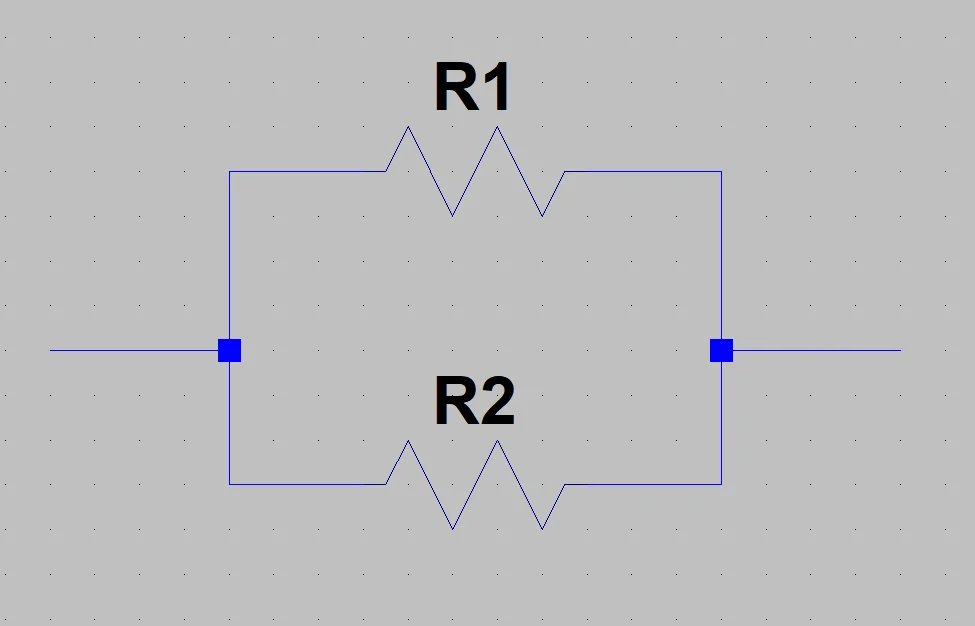
Analizando la figura 1 podemos ver que el voltaje aplicado a cada resistencia es el mismo para todas, lo que generará una corriente en cada una de estas, la corriente total de la fuente será la suma de las corrientes por todas las ramas de las resistencias.
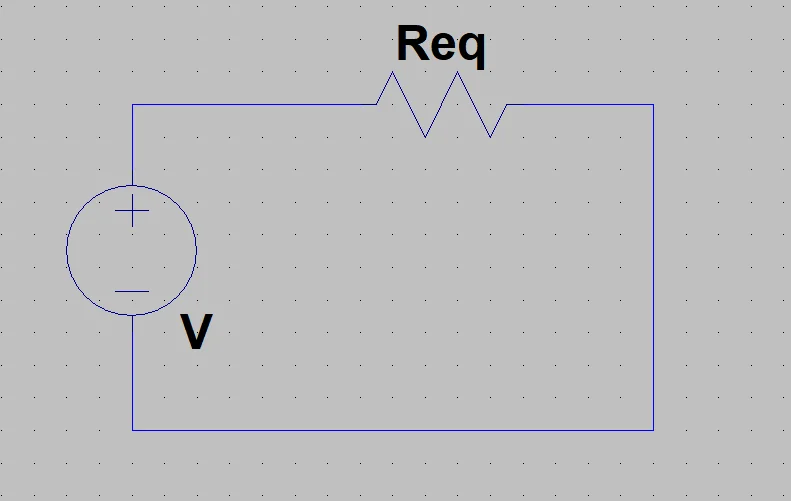
Para comenzar la deducción vamos a suponer un circuito simple que consiste en una fuente de voltaje V conectada al arreglo de resistencias en paralelo, como el que se ilustra en la figura 2.
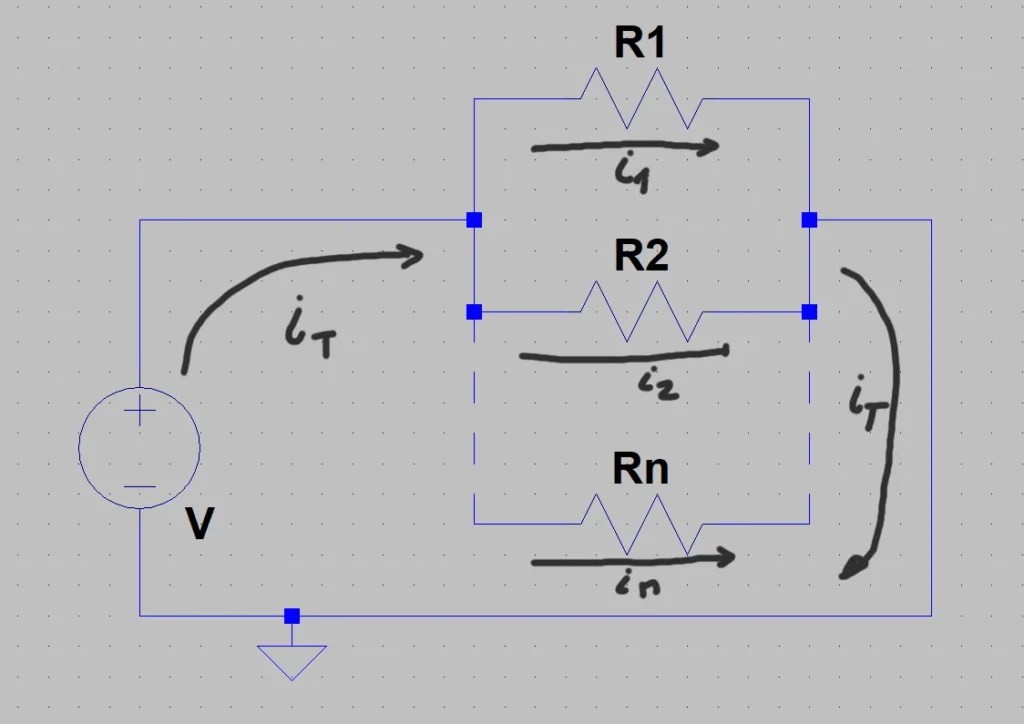
Sobre este circuito vamos a aplicar la Ley de Kirchoff para corriente, que nos dice que un nodo la suma de todas las corrientes que entran al nodo es igual a la suma de todas las corrientes que salen del nodo. Consideramos como nodo un punto que se encuentra entre la fuente de voltaje y la unión de todas las resistencias.
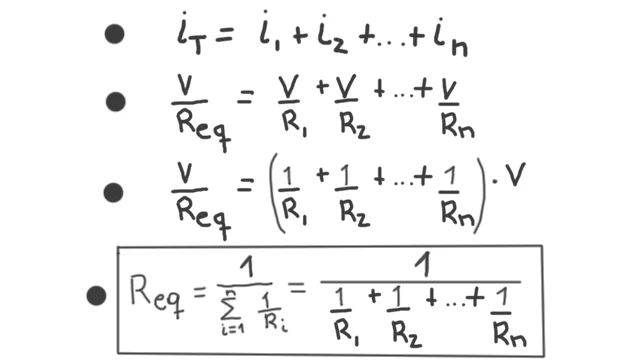
En la figura 3, en la línea 1 he escrito lo que nos dice esta ley considerando que tenemos un número finito de resistencias.
En la línea 2 coloco el valor de las corrientes en términos de voltaje y resistencia de acuerdo a la Ley de Ohm. El siguiente paso es sacar la tensión v como factor común, ya que todas las resistencias tienen aplicada la misma tensión v.
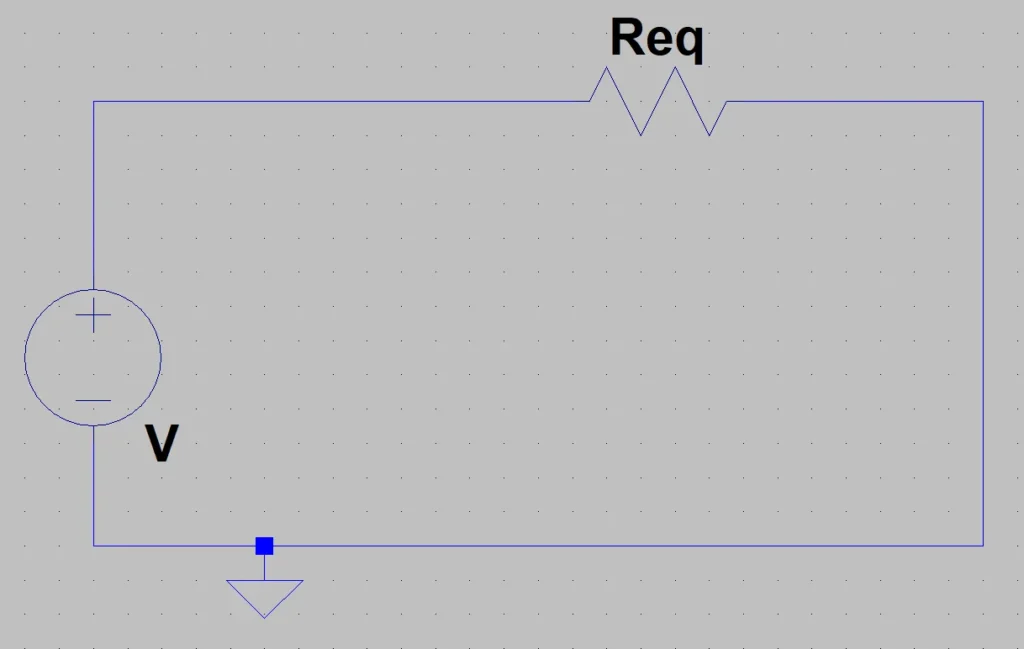
Por último concluimos que lo que se encuentra entre paréntesis en la línea 3 es el valor de una resistencia para un circuito equivalente que en lugar de tener n resistores tiene uno solo con este valor. En la figura 4 vemos este circuito equivalente.
Vamos a armar un circuito simple en LT Spice para mostrar que este resultado se cumple. Si no tenés LT Spice instalado te invito a leer este artículo en el que muestro cómo descargarlo, instalarlo y crear un circuito simple.
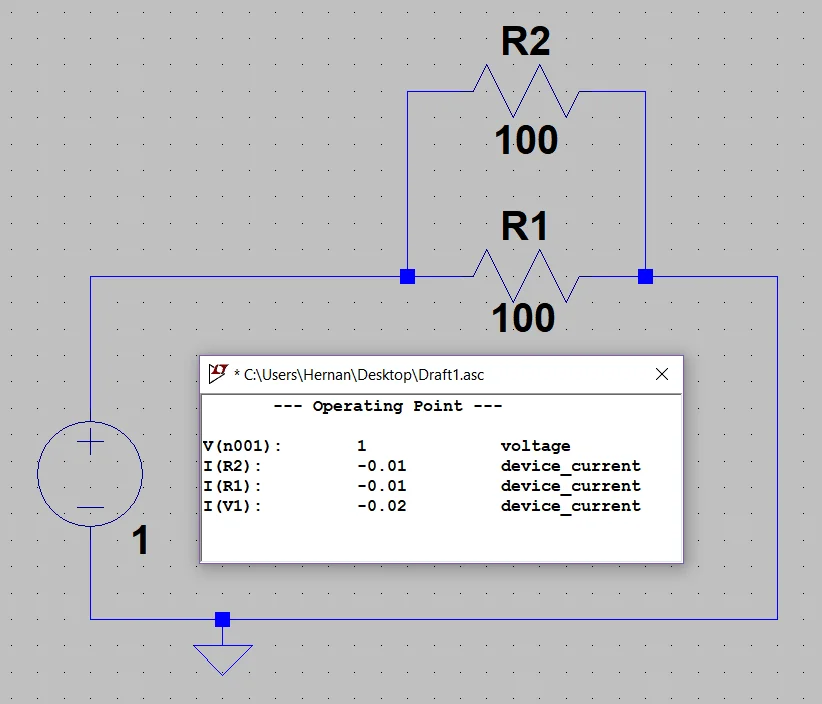
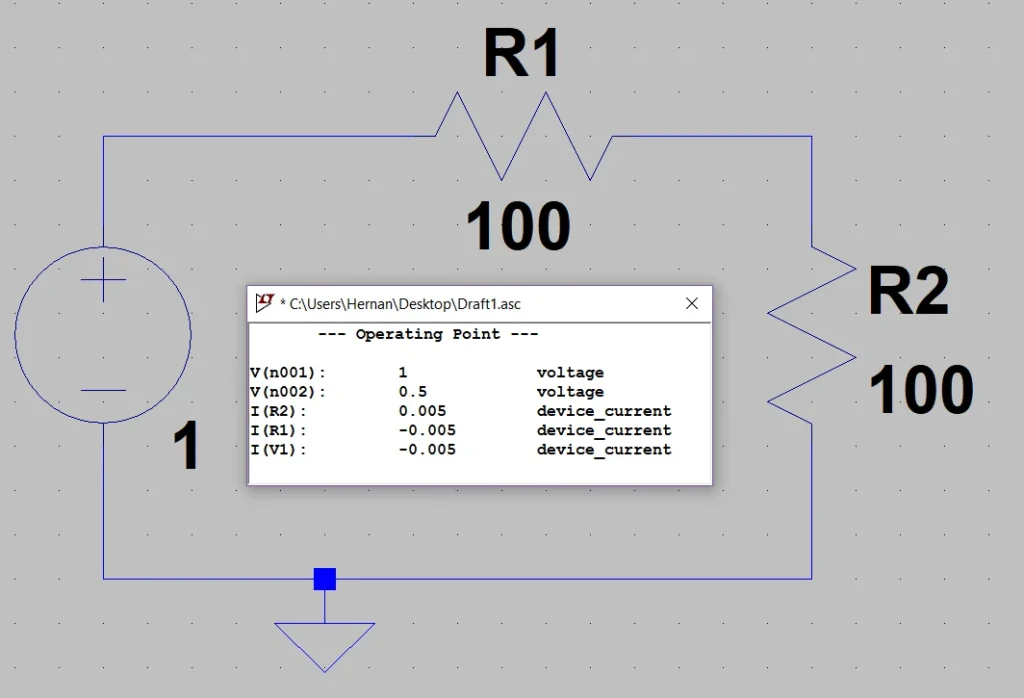
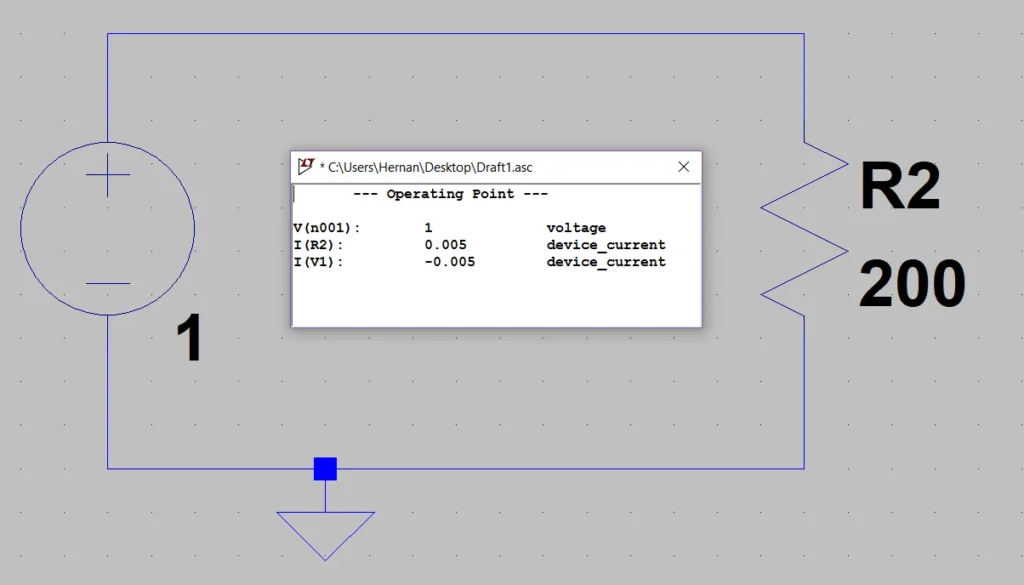
En la figura 5 hemos simulado un circuito con una fuente de voltaje de 1 Volt y dos resistencias de 100 Ohm conectadas en paralelo, mientras que en la figura 6 tenemos un circuito con la misma fuente de voltaje pero solo una resistencia con el valor de resistencia equivalente que sería 200 Ohms.
Como se observa en los carteles con el resultado de la simulación, la corriente que circula a través de la fuente de voltaje es la misma en ambos casos, por lo que podemos concluir que estos circuitos son equivalentes.
Hemos analizado un circuito con resistencias en paralelo genéricas y aplicado las leyes de corriente para determinar una expresión de resistencia equivalente.
Cuando tenemos arreglos de resistencias en paralelo sabemos que estas tienen aplicada la misma tensión en sus extremos, aplicando las leyes de Kirchoff podemos deducir una expresión para la resistencia equivalente.
Finalmente hemos hecho una simulación para mostrar que podemos pensar un circuito equivalente agrupando las resistencias.
En este artículo vamos a deducir cómo calcular el valor resistivo resultante al colocar resistencias en serie, es decir conectar dos o más resistencias encadenadas. Además vamos a utilizar LT Spice para verificar estos resultados.
Si pensamos en el tamaño físico de los resistores nos damos cuenta de cuál va a ser el resultado. Supongamos que tenemos resistencias idénticas de 100 Ohms que miden 1 cm, si colocamos dos de estas resistencias una a continuación de la otra tendríamos dos centímentros de material resistivo, entonces de manera intuitiva podemos decir que dos resistencias de 100 Ohm en serie darán como resultado un valor resistivo de 200 Ohm.
Este razonamiento nos conduce a pensar que si tenemos resistencias conectadas en serie, se sumará su valor Óhmico.
Para comenzar la deducción vamos a suponer un circuito simple que consiste en una fuente de voltaje V conectada al arreglo de resistencias en serie, como el que se ilustra en la figura 2.
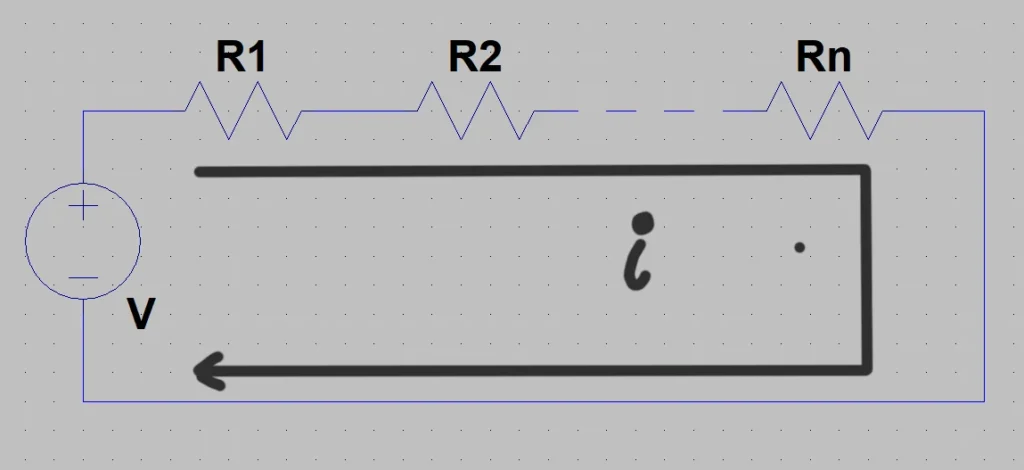
Sobre este circuito vamos a aplicar la Ley de Kirchoff para voltaje, que nos dice que un circuito cerrado la suma de todas las caidas de potencial dá como resultado 0.
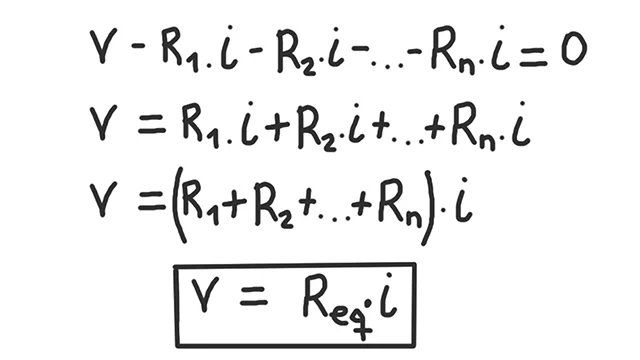
En la figura 3, en la línea 1 he escrito lo que nos dice esta ley considerando que tenemos un número finito de resistencias.
En la línea 2 coloco todas las resistencias del lado derecho de la ecuación. El siguiente paso es sacar la corriente i como factor común, ya que por todas las resistencias circula esta misma corriente i.
Por último concluimos que lo que se encuentra entre paréntesis en la línea 3 es el valor de una resistencia para un circuito equivalente que en lugar de tener n resistores tiene uno solo con este valor. En la figura 4 vemos este circuito equivalente.
Vamos a armar un circuito simple en LT Spice para mostrar que este resultado se cumple. Si no tenés LT Spice instalado te invito a leer este artículo en el que muestro cómo descargarlo, instalarlo y crear un circuito simple.
En el siguiente video puedes ver el proceso de instalación y el diseño y simulación de un circuito con resistencias serie y fuente de voltaje continuo.
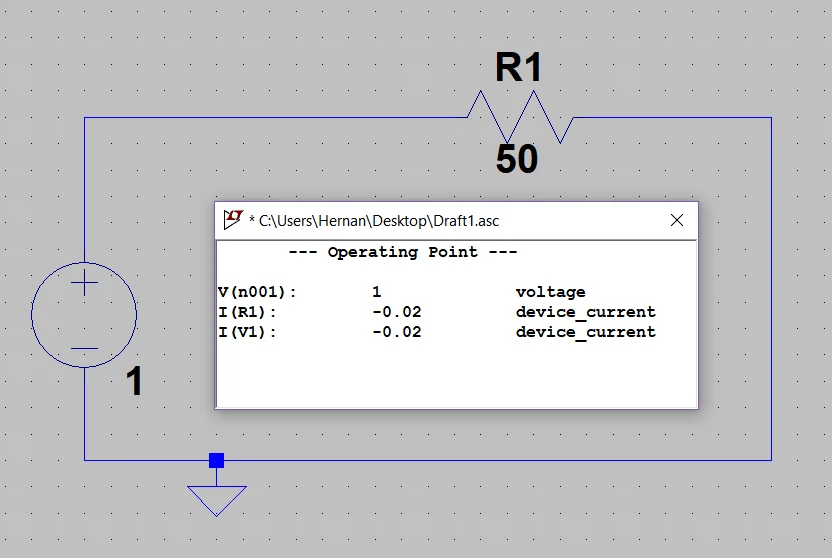
En la figura 5 hemos simulado un circuito con una fuente de voltaje de 1 Volt y dos resistencias de 100 Ohm conectadas en serie, mientras que en la figura 6 tenemos un circuito con la misma fuente de voltaje pero solo una resistencia con el valor de resistencia equivalente que sería 200 Ohms.
Como se observa en los carteles con el resultado de la simulación, la corriente que circula a través de la fuente de voltaje es la misma en ambos casos, por lo que podemos concluir que estos circuitos son equivalentes.
Hemos planteado de manera intuitiva cuál podría ser el valor de resistencia equivalente de un arreglo de resistores en serie.
Cuando tenemos arreglos de resistencias en serie la corriente que circula es la misma en todas, aplicando las leyes de Kirchoff podemos deducir una expresión para la resistencia equivalente.
Finalmente hemos hecho una simulación para mostrar que podemos pensar un circuito equivalente agrupando las resistencias.
Sin duda una herramienta útil a la hora de hacer pruebas de funcionamiento en los circuitos es el Protoboard. En este artículo vamos a ver de qué se trata, tamaños, accesorios, conexiones internas y vamos a ver ejemplos de conexión incorrecta y conexión correcta de elementos.
Usualmente antes de implementar un circuito eléctrico se hace un esquemático y la simulación para verificar que todo funcione correctamente y hacer mejoras. En esta página vamos a utilizar LT Spice para simular circuitos, haz clic aquí para leer el artículo en el que se explica como descargar e instalar este software.
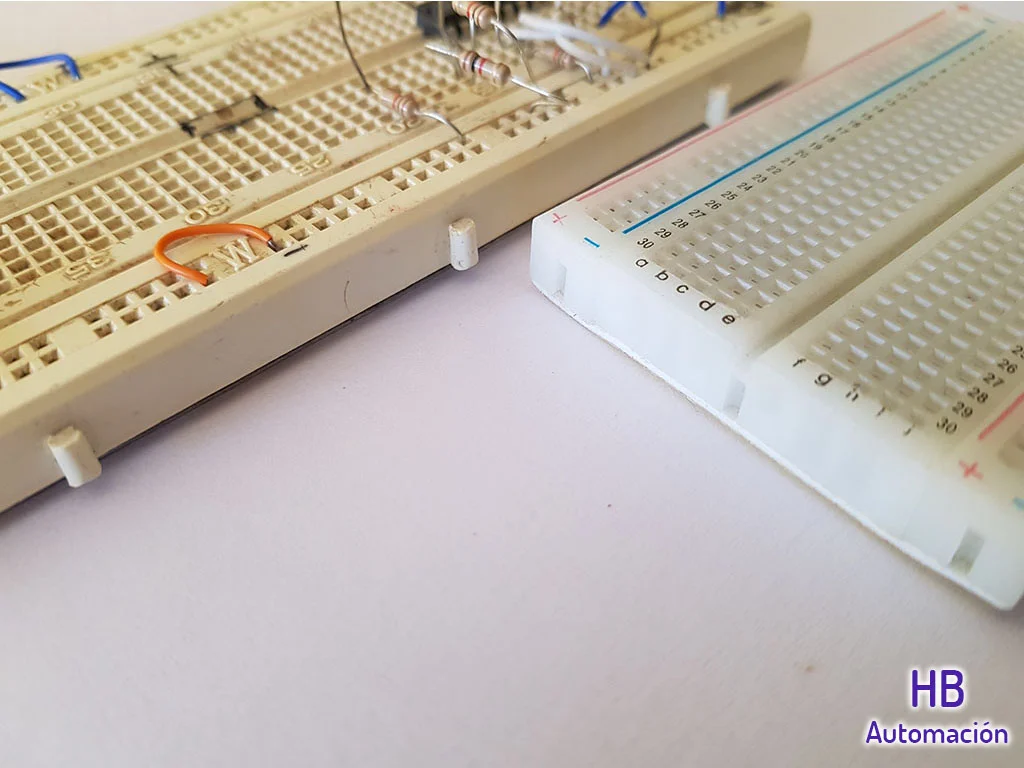
Como vemos en la figura 1 se trata de una placa que tiene una gran cantidad de perforaciones en donde podemos colocar nuestros componentes.
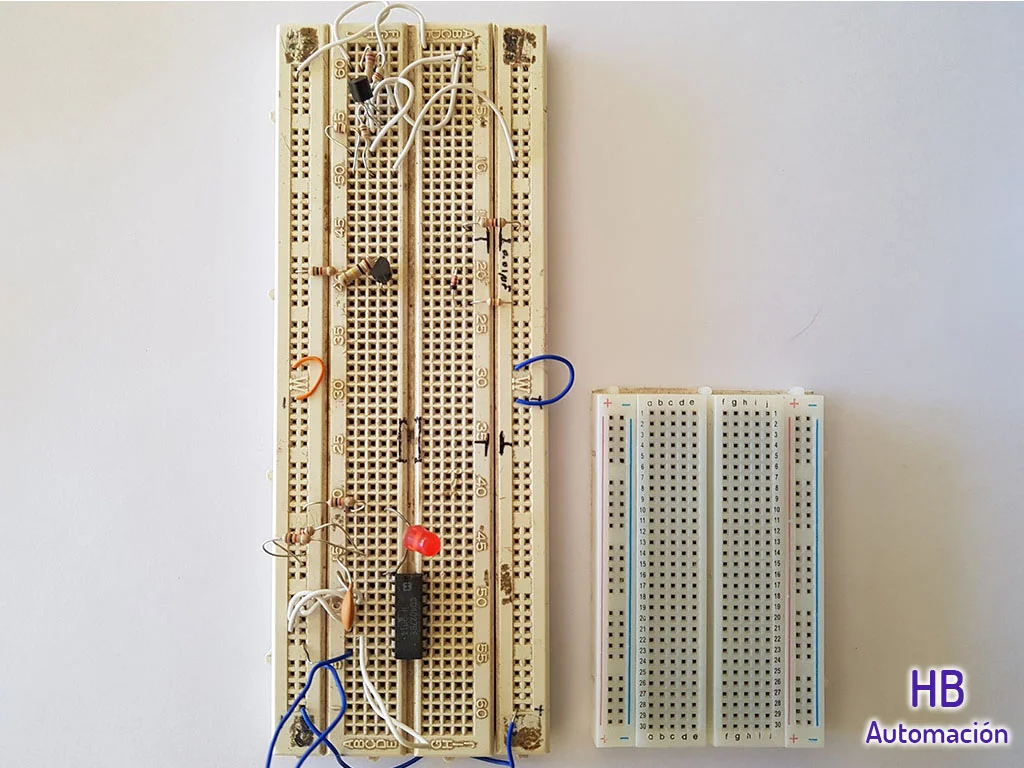
Dependiendo el circuito que queramos implementar puede que necesitemos más de un Protoboard, es bueno saber que la mayoría cuenta con zócalos en sus laterales para encastrar placas del mismo fabricante.
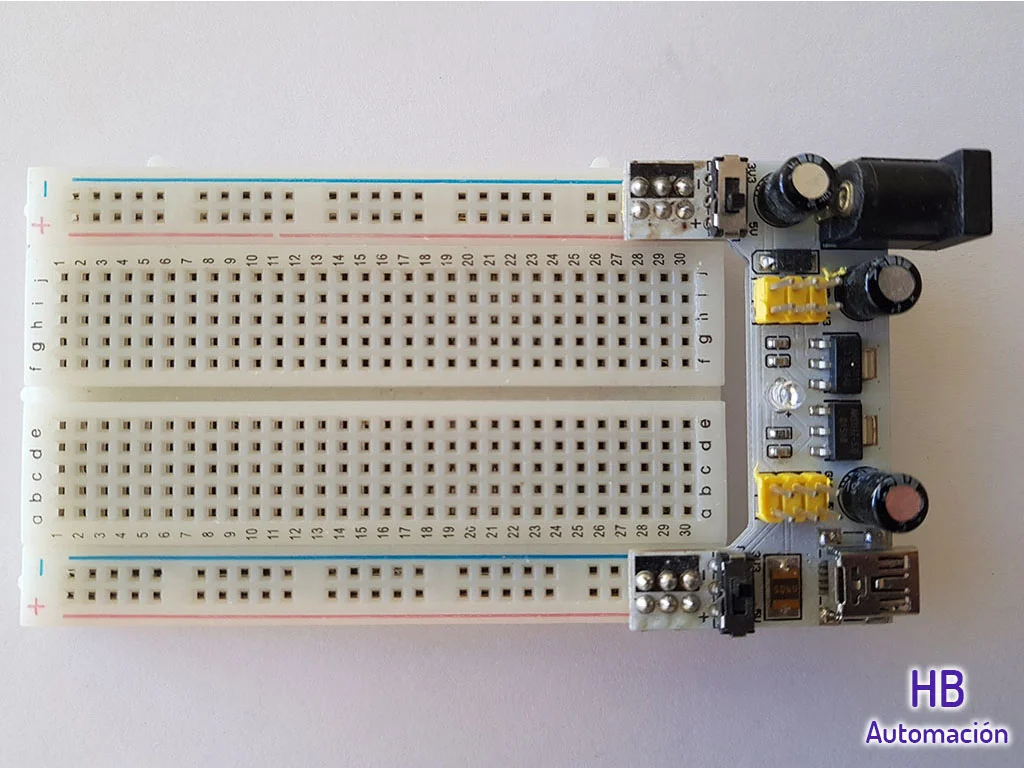
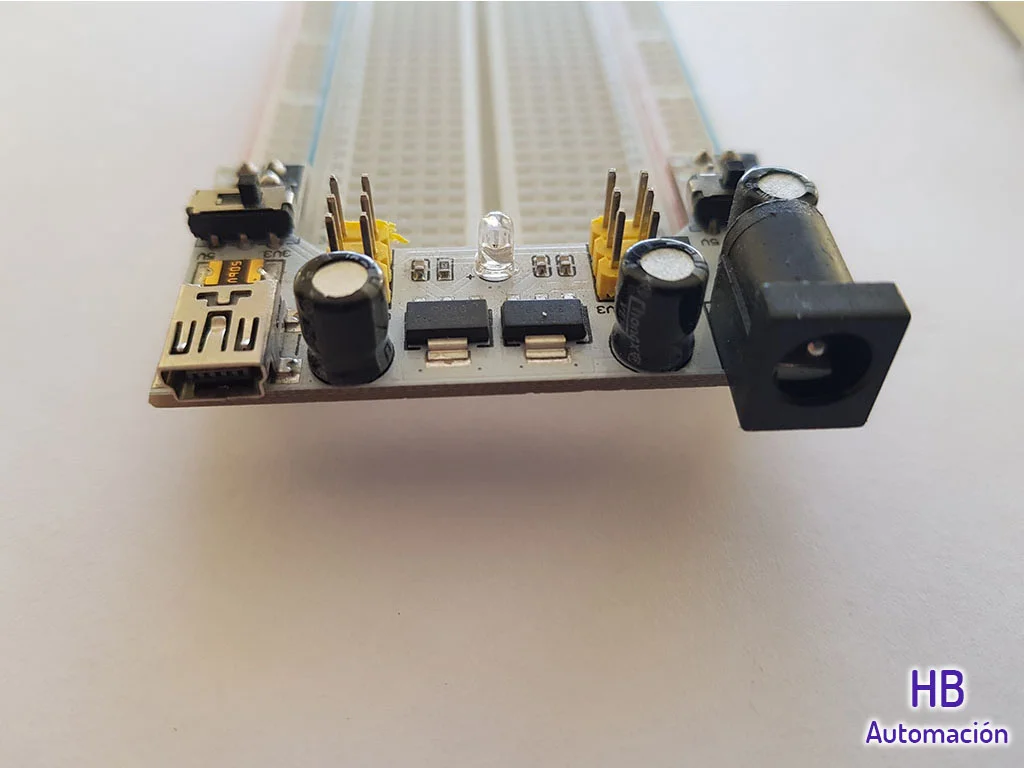
Además en el mercado podemos encontrar ciertos accesorios que podemos usar en el protoboard, como cables con terminales macho y fuentes de contínua.
En las figuras 3 y 4 vemos un ejemplo de estas fuentes que vienen preparadas para colocar en la protoboard. La podemos alimentar con transformador o con cable USB y tren dos switches que nos permiten elegir entre 3.2V y 5V.
En la figura 5 he resaltado con colores para mostrar cómo están hecho los puentes debajo de la matriz de puntos.
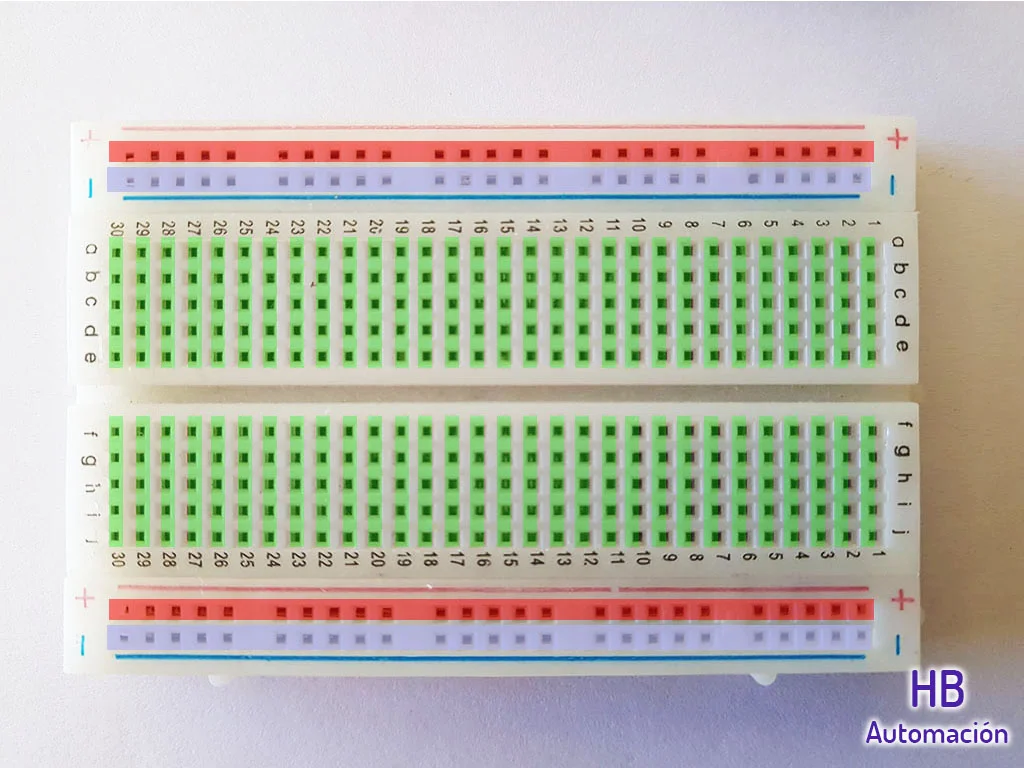
En ambos extremos de la placa vemos una línea roja indicada con un signo «+» y otra azul con un signo «-«, estas líneas se utilizan para para proveer voltaje a nuestros circuitos.
En el medio en color verde tenemos 60 líneas de 5 puntos que podemos utilizar para hacer las interconexiones de nuestro circuito.
Los 5 puntos de cada línea se encuentran puenteados entre sí debajo de la placa, lo que nos ayuda a reducir la cantidad de cables que necesitamos.
Otro detalle importante es que contamos con números para las filas y letras para las columnas de modo que podemos identificar cada punto del Protoboard, por ejemplo A-1 es el primer punto arriba a la derecha en la figura 5 y J-30 es el último punto en la parte inferior izquierda.
Cuando tenemos dispositivos de varias patas como transistores o circuitos integrados, es importante que sepamos como es la distribución interna de puentes, de otra forma podemos equivocar la manera de conectarlos.
En la figura 6 vemos ejemplos de conexiones correctas e incorrectas.
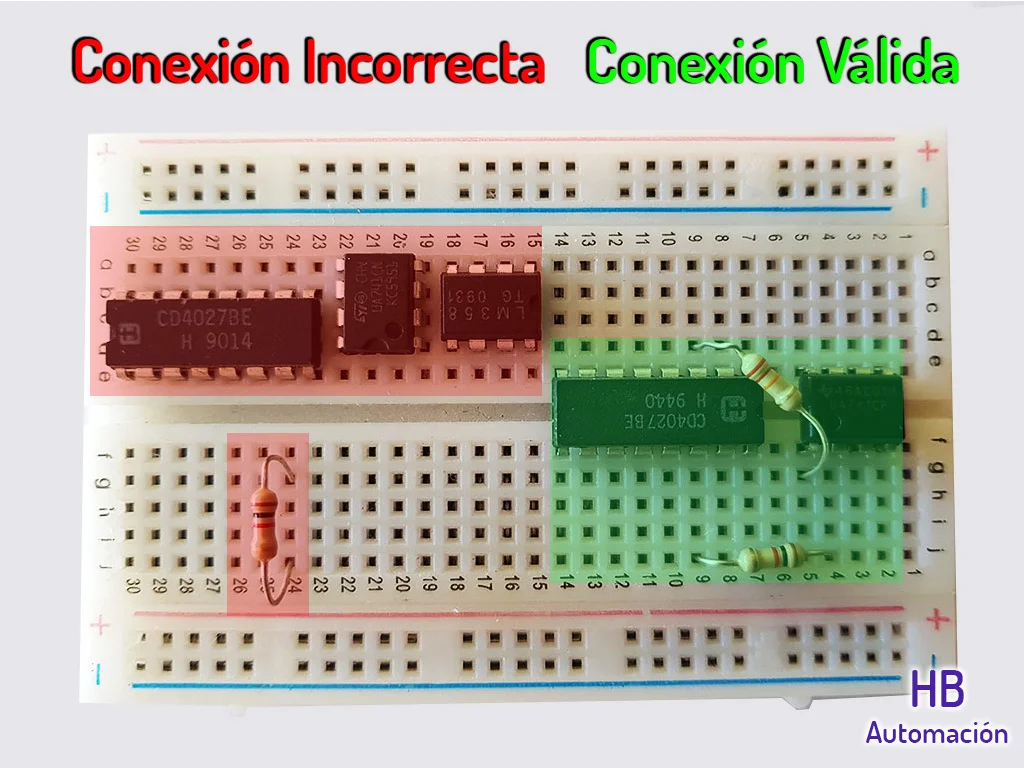
Por ejemplo tomemos el caso de la resistencia conectada en los puntos G-24 y J-24, los 5 puntos de la línea 24 desde la letra F a la J están puenteados entre sí, de modo que no tiene sentido conectar una resistencia en dos de estos puntos, la corriente nunca circulará a través de ella.
El protoboard es una herramienta útil a la hora de probar el funcionamiento de nuestros circuitos.
Dependiendo del proyecto, necesitaremos placas más grandes o más pequeñas, es bueno saber que placas del mismo tipo se pueden encastrar utilizando los zócalos laterales y que hay accesorios que nos pueden facilitar la alimentación y las conexiones d elos elementos.
Es importante conocer la distribución de los puentes internos de la placa, de esa forma evitaremos colocar mal los elementos.
En este artículo vamos a ver cómo descargar e instalar el software LT Spice para simular circuitos eléctricos y electrónicos. Además crearemos un circuito simple para poder probar el programa.
En el siguiente video puedes ver el proceso de instalación y el diseño y simulación de un circuito con resistencias serie y fuente de voltaje continuo.
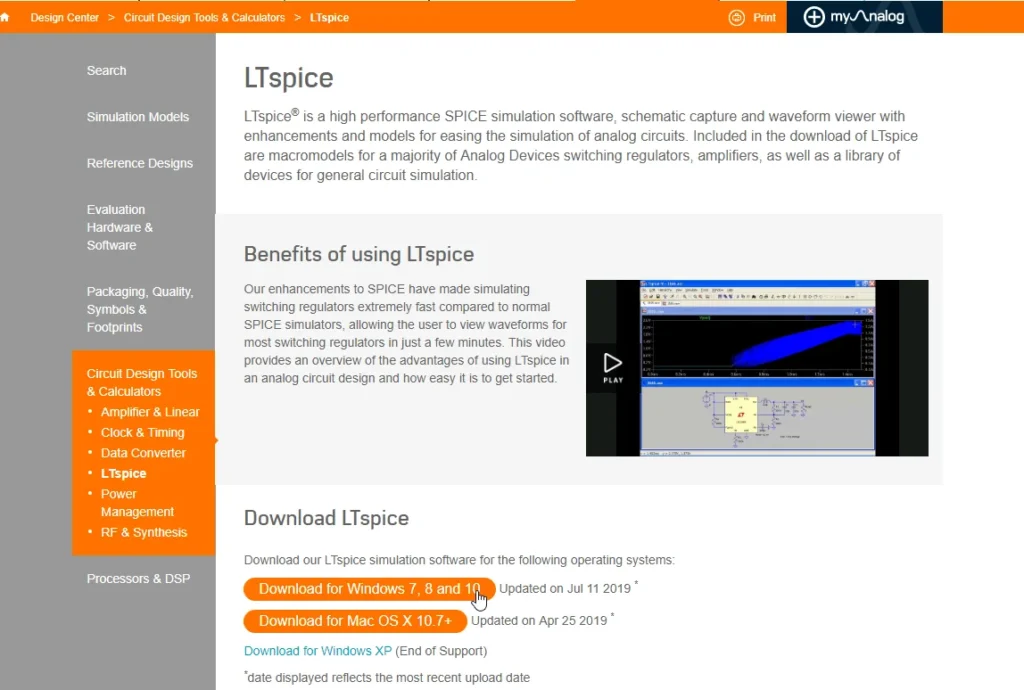
En primer lugar vamos a descargar el instalador desde la página oficial, haz clic en el siguiente enlace:
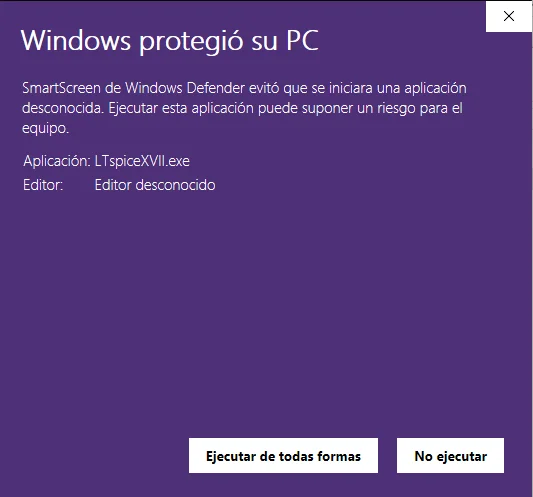
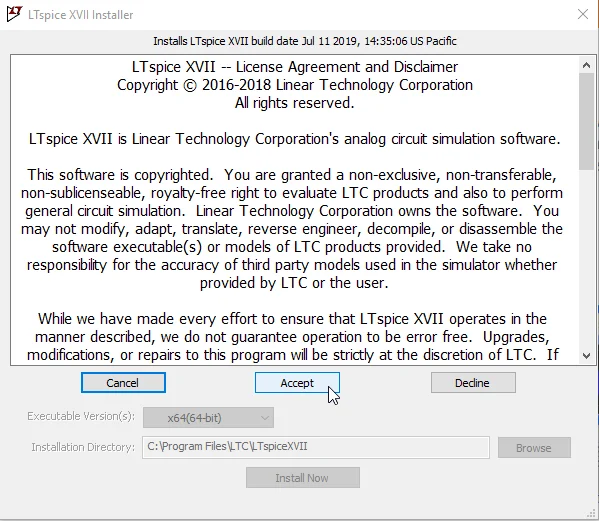
Una vez que la descarga termina la ejecutamos. En mi caso me salió una pantalla diciendo que la instalación fue bloqueada por el sistema de protección de Windows, al hacer clic en «Más información» apareció el botón «Ejecutar de todas formas».
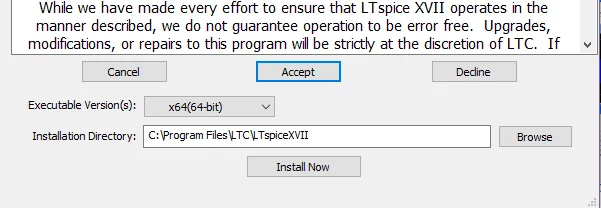
Aceptamos el contrato y elegimos la ubicación de instalación. En mi caso dejo todo por defecto.
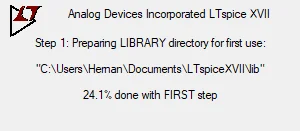
Al terminar la instalación el programa se ejecuta automáticamente, aparece el cartel que se ve en la figura 6 diciendo que el programa se prepara para ejecutarse por primera vez.
Al terminar el proceso aparece la ventana principal del programa, ya estamos listos para empezar a crear esquemáticos y simular circuitos eléctricos y electrónicos.
A continuación vamos a crear un circuito muy simple como el que vimos en el artículo sobre qué es la resistencia eléctrica, el cual consistía en una fuente de voltaje y una resistencia.
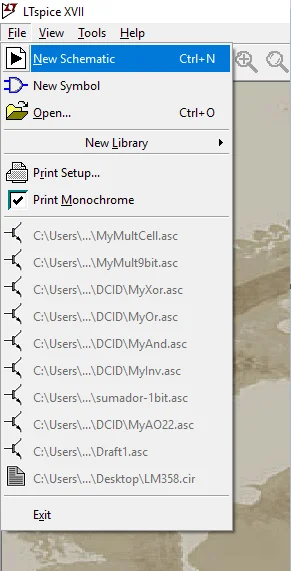
En primer lugar vamos a File > New Schematic, para crear un nuevo proyecto, esto se puede ver en la figura 8.
Nos aparece el espacio de trabajo en gris, aquí empezaremos a construir el esquemático.
Vamos a añadir elementos, hacemos clic en el botón de la compuerta AND que se observa en la figura 9.
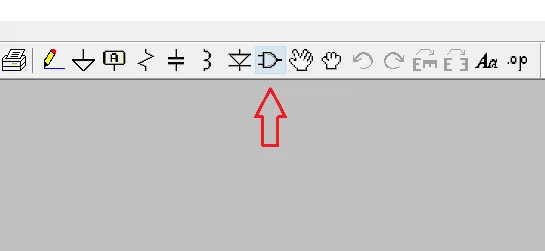
Esto nos desplegará una ventana en la que podremos elegir los componentes.
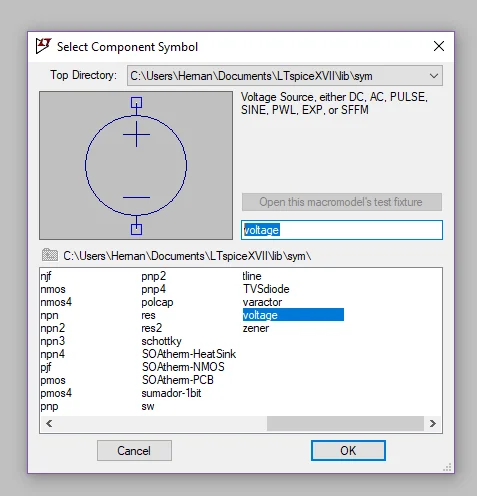
Para alimentar nuestro circuito vamos a necesitar una fuente de voltaje, en la barra de búsqueda de la ventana de componentes escribimos «voltage» y seleccionamos la fuente genérica que se observa en la figura 10.
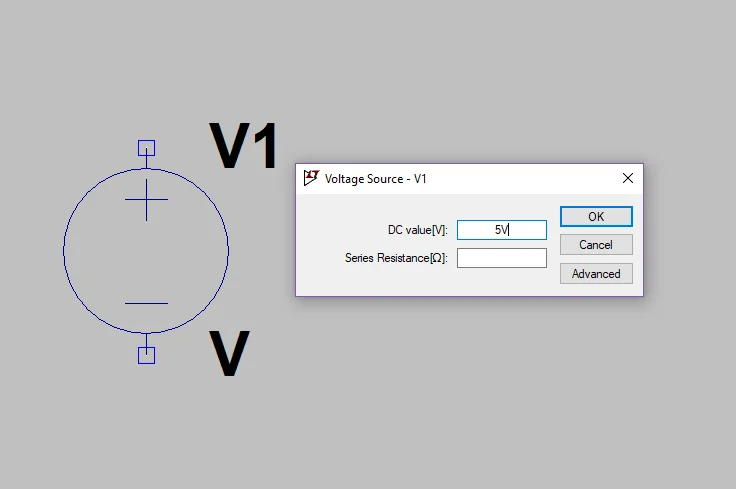
La colocamos en el espacio de trabajo y hacemos clic derecho sobre ella, esto abrirá una ventana para ingresar los parámetros de la fuente, en mi caso voy a usar 5 Volts.
El botón «Advanced» nos permitirá definir parámetros avanzados de la fuente, como el tipo de señal, frecuencia, período, duración, tiempos de ascenso y descenso, entre otros. Por ahora sólo nos vamos a quedar con la fuente de corriente contínua que viene por defecto.
Vamos a agregar el resistor, volvemos a apretar el botón de la compuerta AND (figura 9) y esta vez escribimos «resistor» en la barra de búsquedas. Seleccionamos el resistor genérico que se observa en la figura 12.
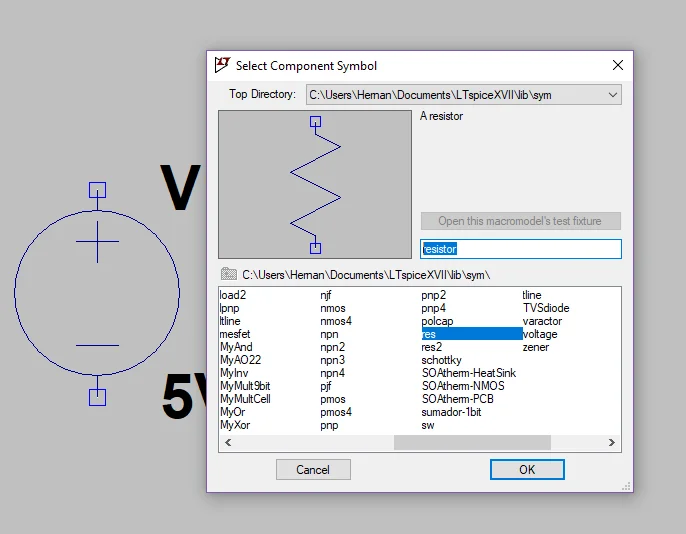
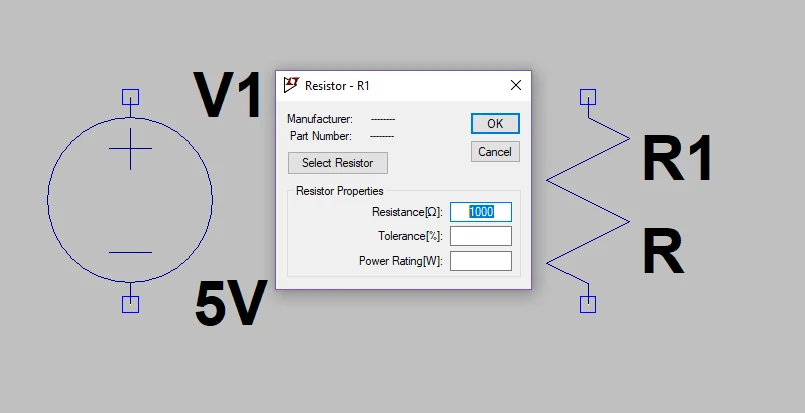
Lo colocamos en el espacio de trabajo y hacemos clic derecho sobre él para ingresar los parámetros.
Por el momento sólo ingresaremos un valor de resistencia de 1000 (la unidad estándar es Ohm, como vemos en la figura 13 entre corchetes a la izquierda del valor 1000).
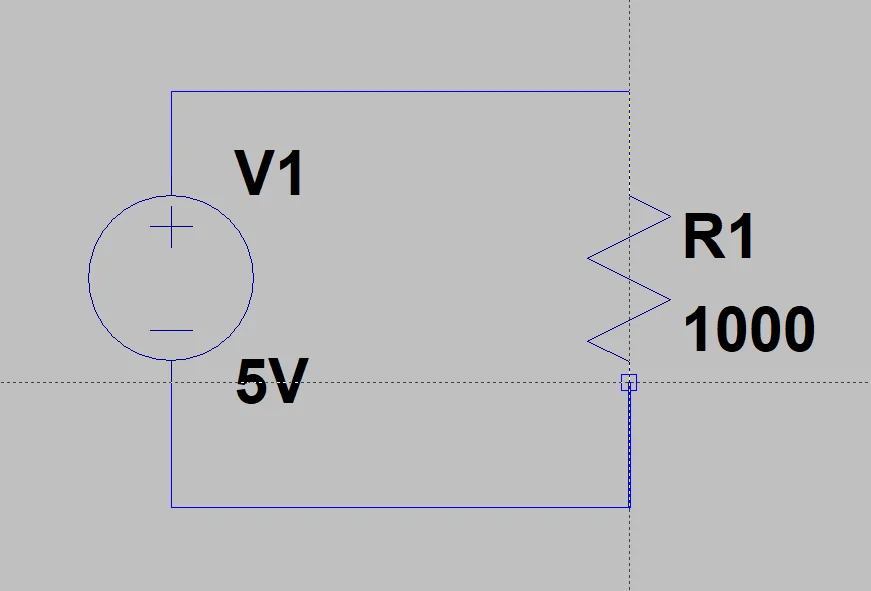
Cuando todos los elementos están en su lugar, vamos a hacer las conexiones. Hacemos clic en el botón del lapiz que se ve en la figura 9 o utilizamos el acceso directo F3.
Luego dibujamos las conexiones entre la fuente y la resistencia.
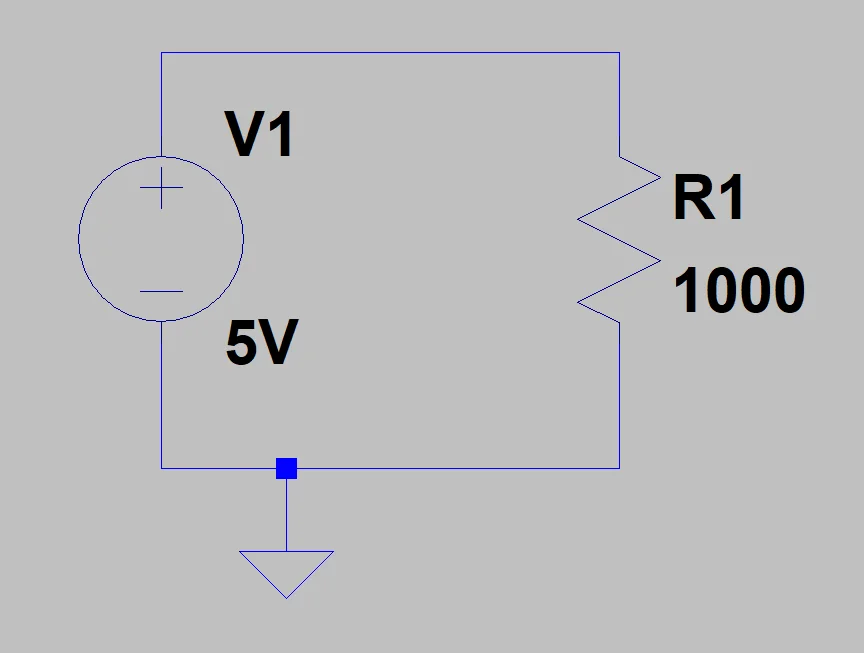
Por último para que el programa pueda realizar los cálculos necesita un punto de tierra para referencia. Hacemos clic en el botón triangular de la figura 9 o con la tecla «G».
Colocamos la tierra en el cable que está conectado al terminal negativo de la fuente, como se ve en la figura 15.
Cuando terminamos el esquemático, pasamos a configurar los parámetros de la simulación.
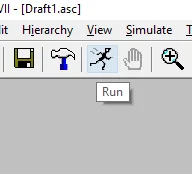
Si es la primera vez que vamos a simular hacemos clic en el botón Run que se ve en la figura 16. Si no es la primera vez vamos a la pestaña «Simulate» y hacemos clic en «Edit Simulation CMD».
En la ventana de configuración de simulación vamos a elegir la última pestaña llamada «DC op pnt», que se observa en la figura 17.
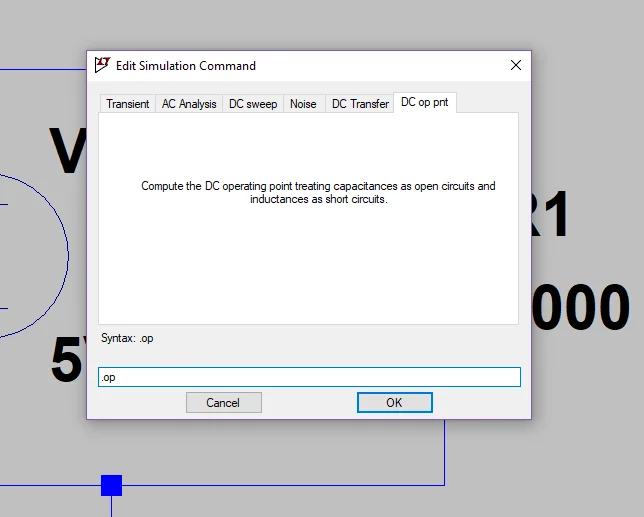
Con esta opción el programa hará un cálculo de corriente continua del circuito, mostrando los voltajes en todos los nodos y las corrientes en todas las ramas.
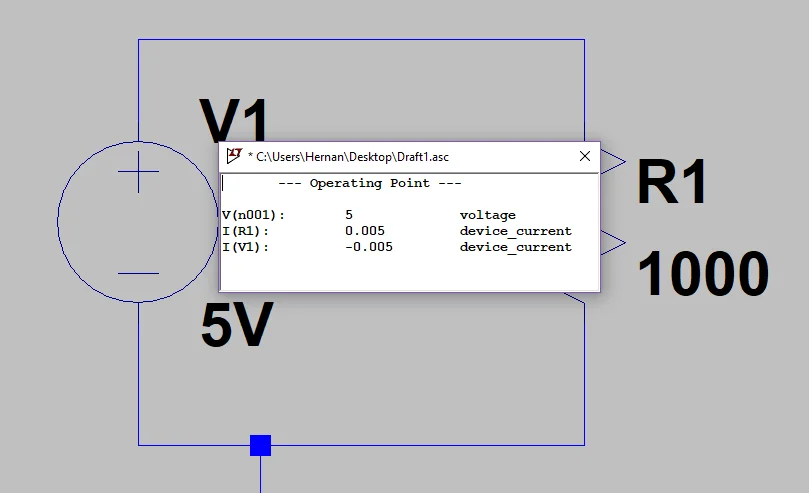
En la ventana que aparece podemos ver que la corriente en la resistencia es 5 mA, lo cual se condice con tomar los 5 V de la fuente y dividirlos por 1000 Ohms de la resistencia, de acuerdo a la Ley de Ohm.
Con esto terminamos el ejercicio, estamos listos para simular circuitos eléctricos y electrónicos más complejos. En otros artículos hablaremos sobre cómo trazar gráficas o producir otras simulaciones.
En este artículo vamos a ver el concepto de resistencia eléctrica, elementos resistivos y vamos a analizar un circuito simple para ver el efecto que tiene la misma sobre la corriente.
Se trata de una propiedad de la materia que indica la dificultad que tiene la corriente eléctrica para atravesarla.
Existen materiales que tienen una resistencia baja, en la cual la corriente puede fluir con facilidad y existen otros materiales que tienen resistencia alta, en los que es más difícil que la corriente circule.
Materiales con resistencia baja se llaman conductores y materiales con resistencia alta se los llama aislantes.
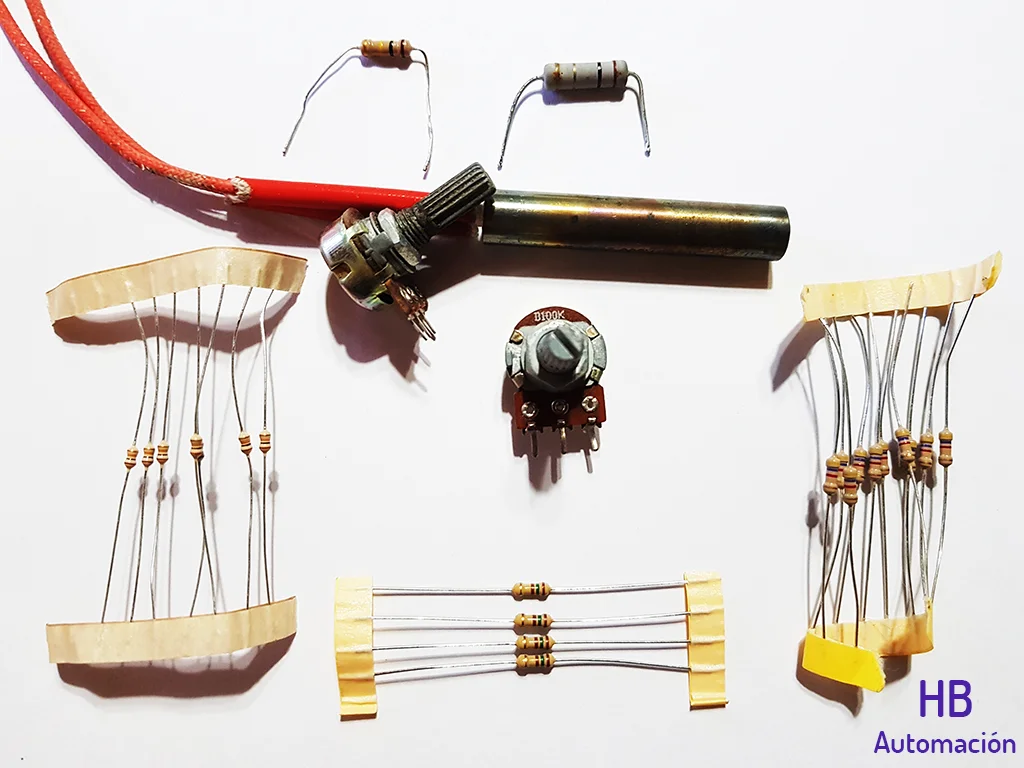
Por otra parte «Resistencia» es el nombre que se le dá a ciertos elementos que se construyen con el propósito de contar con un valor de resistencia predecible, podemos ver algunos ejemplos en la figura 1.
Estos elementos se utilizan en los circuitos para lograr que las corrientes se comporten de determinada forma.
Vamos a simular un circuito simple con una fuente de voltaje de 10 Volts de corriente contínua conectada a una resistencia. El objetivo será analizar cómo es la corriente en el circuito.
Para la simulación vamos a usar LT Spice, haz clic aquí para ir al artículo en el que descargamos e instalamos este software y también mostramos cómo dibujar el siguiente esquemático y configurar la simulación.
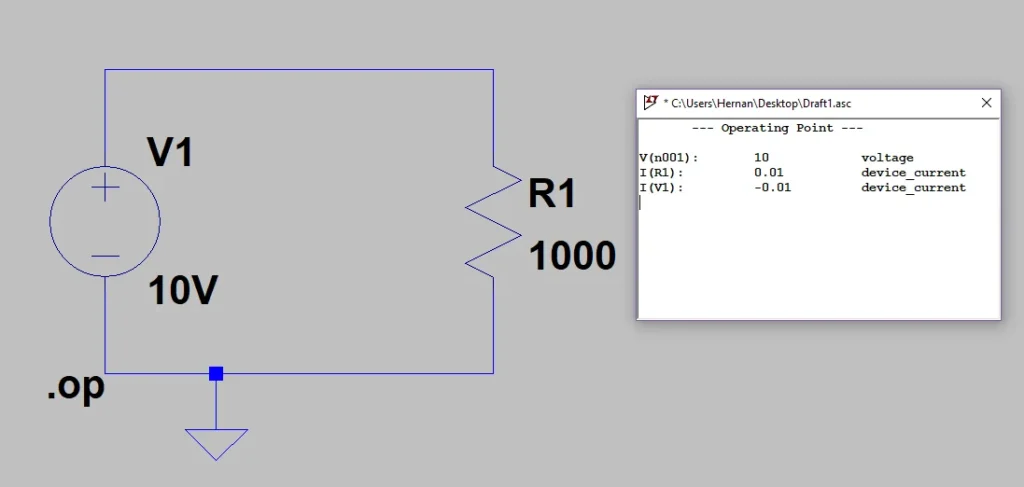
En el primer caso, ilustrado en la figura 2, la resistencia del circuito es 1000Ω o 1KΩ (kilo ohm) como se le llama más frecuentemente.
Al correr la simulación vemos que la corriente resultante es de 0.01A (Ampere) o 10mA (mili Ampere).
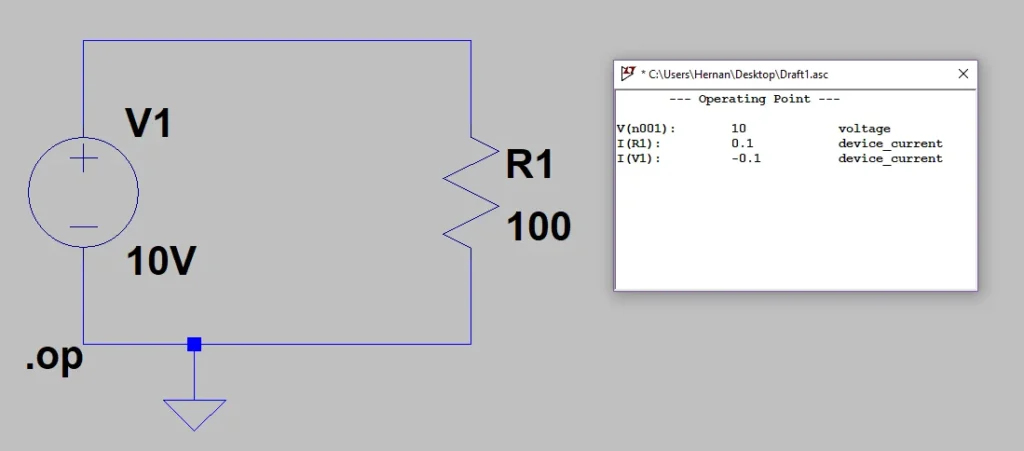
Si ahora cambiamos el valor de resistencia a 100 Ω y simulamos nuevamente, la corriente ahora aumenta a 100 mA. (Figura 3)
En la tercer prueba le damos a la resistencia un valor de 10 Ω y al simular la corriente aumenta a 1 A, figura 4.
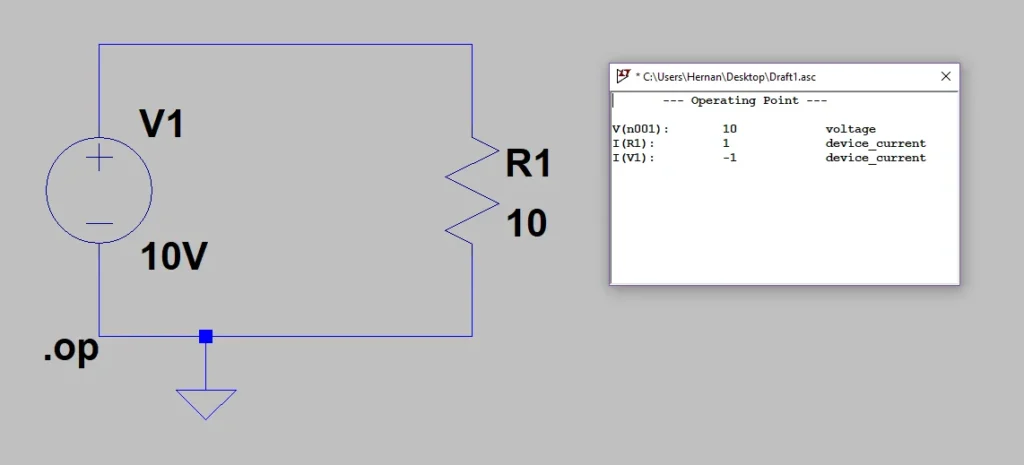
Lo que observamos es que al disminuir el valor de resistencia, manteniendo todos los demás parámetros del circuito fijos, la corriente aumenta.
La resistencia es una propiedad que determina qué tan buen conductor de la electricidad es un material.
Materiales con baja resistencia como los metales son buenos conductores de la electricidad, mientras que materiales con alta resistencia son llamados aislantes, como el plástico.
En un circuito eléctrico simple podemos ver cómo se comporta la corriente cuando cambiamos la resistencia, dejando los demás parámetros fijos. Vemos que tienen una relación inversa, a menor resistencia, mayor corriente.
La electricidad está tan presente en nuestra vida cotidiana que muchas veces olvidamos su importancia hasta que de pronto ocurre un apagón. En este artículo vamos a ver el concepto de electricidad, su aplicación en el hogar y la industria. Además vamos a adentrarnos un poco en la naturaleza de la materia para entender de dónde surge la electricidad como la conocemos.
Preservar nuestros alimentos, calentar el agua de la casa, calefacción y entretenimiento, son algunos ejemplos de aplicación de la electricidad en el hogar.
En la industria en general se utiliza para hacer funcionar máquinas que requieren potencia, como motores y ventiladores. También para alimentar sistemas de control.
¿Cómo funcionan todos estos dispositivos eléctricos?
En todos los casos lo que ocurre es que circula una corriente eléctrica por estos aparatos, excita sus circuitos internos y produce un efecto.
Hay dos tipos de corriente eléctrica, corriente contínua (CC en español, DC en inglés) y corriente alterna (CA en español, AC en inglés).
La corriente contínua se utiliza en general para alimentar sistemas digitales como televisores LED, computadoras y radios. Mientras que la corriente alterna su utiliza para hacer funcionar motores, resistencias para generar calor, entre otros.
Es posible convertir un tipo de corriente en otra utilizando el dispositivo apropiado. El más común es el transformador que usamos para cargar el smartphone o la notebook, estas máquinas se alimentan de la corriente alterna de las tomas de corriente del hogar y la convierten en corriente continua.
Sabemos que la energía eléctrica tiene que «salir» de algún lugar, en general nuestra casa está conectada a la red eléctrica de una ciudad o pueblo y tenemos enchufes o tomas de corriente.
Esta energía proviene de plantas en las que se utilizan máquina que transforman un tipo de energía como podría ser la del viento, del sol o de combustibles fósiles, en energía eléctrica.


En lugares alejados donde no llega el tendido eléctrico es necesario recurrir a otras soluciones para conseguir energía eléctrica. Por ejemplo instalar paneles solares o grupos electrógenos y aplicar mucho el uso racional de la energía.

Hemos hablado sobre su aplicación, el principio de funcionamiento de las máquinas eléctricas y los tipos de corriente, ahora vamos a adentrarnos un poco en la naturaleza de la materia para entender con más profundidad
En la antigüedad se descubrió que la materia podía estar «cargada» de alguna forma, ya que al frotar ciertos materiales con otros aparecía una fuerza de acción a distancia como la gravedad. Estamos hablando del típico experimento que hacemos en la escuela primaria en el que frotamos la regla en nuestro pelo y luego podemos hacer que pedacitos de papel se adhieran a ella.
Además se descubrió que había dos tipos de cargas, a las cuales más adelante se conocieron como carga positiva y carga negativa.
Observando la interacción entre estos materiales cargados se notó que las cargas del mismo tipo se repelen y las cargas de disinto tipo se atraen.
Estas cargas presentes en la materia son las que dan origen a la corriente eléctrica.
La electricidad es muy utilizada en la vida cotidiana para alimentar todo tipo de dispositivos. El principio general de todos estos aparatos es una corriente eléctrica que circula por su interior produciendo un efecto.
Hay dos tipos de corriente eléctrica, corriente contínua y corriente alterna. Podemos convertir un tipo de corriente en otra utilizando el dispositivo apropiado.
La electricidad se genera a través de máquinas que transforman distintos tipos de energía en energía eléctrica.
En la materia existen dos tipos de carga, cargas positivas y cargas negativas. Si dos cargas del mismo tipo se enfrentan, el resultado es una fuerza de repulsión entre ambas. Si dos cargas de distinto tipo se enfrentan aparece una fuerza de atracción entre ellas.
En este artículo vamos a ver qué es un PLC, el principio de funcionamiento, distintos módulos internos.
Las letras PLC son para «Programmable Logic Controller» que significa «Controlador Lógico Programable».
Se trata de un dispositivo de control que podemos darle instrucciones para que haga las tareas que necesitemos.
El PLC es como una computadora pequeña apta para la industria, es decir de características robustas que le permiten funcionar en un entorno industrial. En su interior tiene un microprocesador, memorias RAM y ROM y las interfaces de entrada salida.
Utilizando las herramientas, crearemos un programa que se ejecutará en un bucle infinito. En ese programa estarán definidas las funciones del dispositivo.
Básicamente vamos a crear un programa que analice constantemente los valores de entrada al dispositivo, es decir entradas digitales, analógicas y mensajes provenientes de una comunicación serial. Y en base a estas entradas producir salidas digitales, analógicas o de comunicación serial para lograr el control del proceso deseado.
Por ejemplo, un programa muy simple puede ser: chequear si la entrada 1 del dispositivo tiene voltaje y si eso pasa activar la salida 1.
Dependiendo del fabricante tenemos distintas herramientas que nos permiten crear programas y enviarlos al PLC.
En el caso de la marca Delta, que es la que vamos a utilizar en la página. Tenemos el Software WPLSoft o ISPSoft. A continuación dejo unos links para descargarlo.

En este artículo vamos a ver cómo crear un programa simple para PLC Delta usando las herramientas del software WPLSoft.
En el siguiente video programamos un PLC Delta SX2 utilizando WPLSoft:
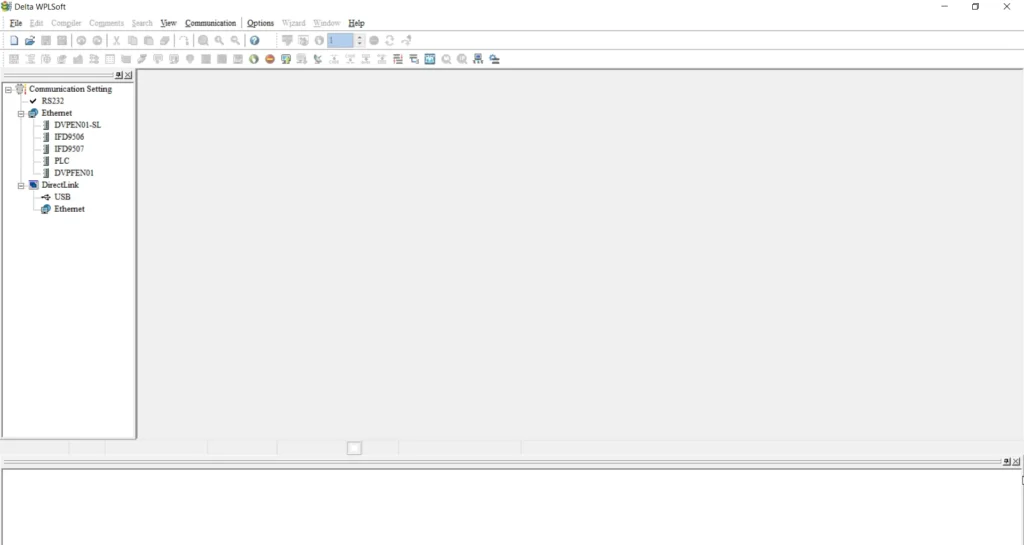
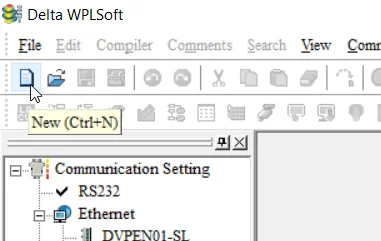
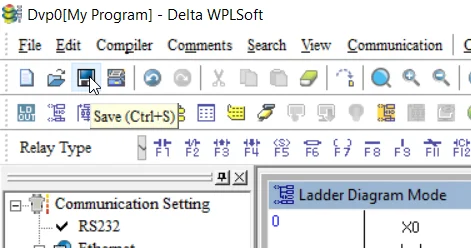
Al abrir el programa WPLSoft vamos a encontrar una interfaz como la que se observa en la figura 1.
Para comenzar a crear un programa para el PLC Delta debemos crear un nuevo archivo o cargar uno que hayamos hecho previamente, hacemos clic en File > New o utilizamos el ícono que se observa en la figura 2
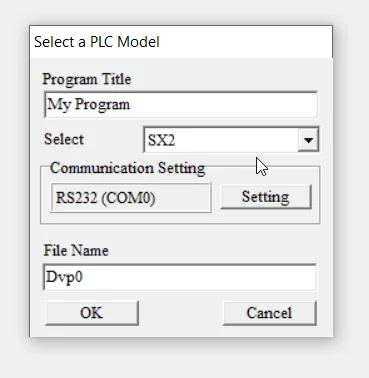
Al crear un nuevo archivo, nos aparece la ventana de la figura 3 en la que podemos configurar algunas opciones como el nombre del archivo o el tipo de PLC, todo esto podremos modificarlo más adelante. Por ahora voy a seleccionar el PLC SX2 que es el que tengo al momento de redactar este artículo y le doy al botón OK.
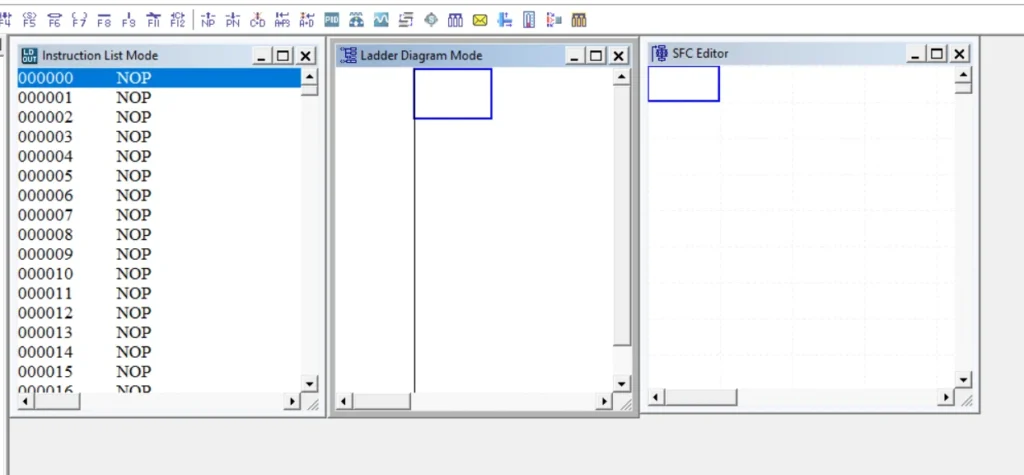
Inicialmente nos aparecen por defecto dos ventanas de las tres ventanas que vamos a utilizar para crear nuestro programa, la ventana de instrucciones maquinales, la ventana de diagrama escalera o ladder y la tercer ventana es la de diagrama de estados o diagrama SFC. Podemos ver estas tres ventanas en la figura 4.
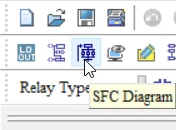
En caso de que alguna ventana se nos cierre o no esté presente, podemos abrirlas utilizando los tres primeros íconos de la barra de herramientas que se observan en la figura 5.
Para empezar vamos a crear un programa simple para el PLC Delta utilizando el diagrama Ladder, así que voy a cerrar las otras dos ventanas.
Entender cómo funciona este esquema es bastante simple con un poco de práctica. Una forma que me resulta útil para interpretarlo es considerar que la línea vertical de la derecha es la tensión de comando, por ejemplo 12 Volts o 220 Volts, luego iremos conectando distintos contactos en serie o en paralelo y al final excitaremos un elemento, que puede ser la bobina de las salidas, un valor interno del PLC o una función.
En la figura 6 vemos que al tener seleccionada la ventana Ladder, en la barra de herramientas nos aparecen varios íconos con los elementos que podemos incluir en nuestro diagrama.
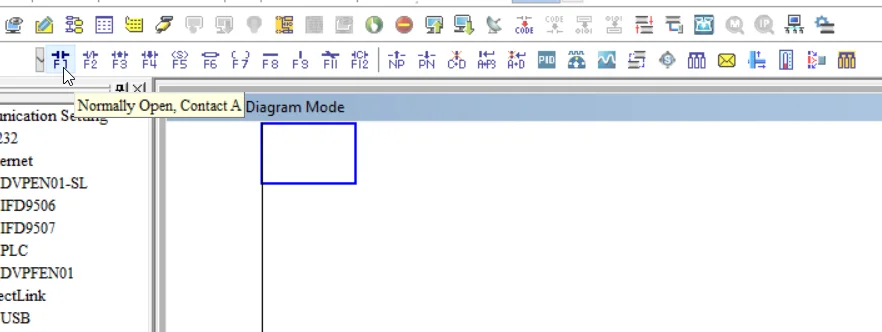
Voy a comenzar poniendo en el diagrama un contacto normal cerrado, hago clic en el ícono que se está señalando en la figura 6 y me aparece la ventana de la figura 7. Aquí podemos elegir el tipo de contacto que queremos, estos contactos representan los estados de distintos elementos.

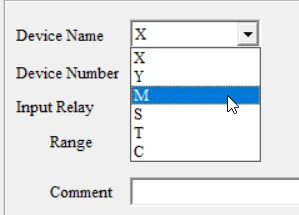
Los contactos X son las entradas del PLC Delta, quiere decir que si por ejemplo elegimos un contacto normal abierto X0 y en la entrada 0 del PLC tenemos tensión, el contacto X0 en el programa estará cerrado.
Los contactos Y son las salidas del PLC Delta, quiere decir que si por ejemplo elegimos un contacto normal abierto Y0 y la salida 0 del PLC tiene tensión (o su contacto está cerrado), el contacto Y0 en el programa estará cerrado.
Los contactos M se conocen como marcas del PLC y son bits internos que podemos usar a modo auxiliar. También hay marcas especiales que indican distintos estados de funcionamiento del PLC.
Los contactos S son estados que podemos utilizar para crear máquinas de estados, sin embargo esto es más intuitivo hacerlo con la ventana de Diagrama SFC.
Los contactos T son temporizadores que podemos utilizar para medir distintos intervalos de tiempo. Cuando el tiempo que definimos en un temporizador se cumple, el contacto T se cerrará (si elegimos un contacto T normal abierto).
Los contactos C son contadores que podemos utilizar para contar pulsos. Si elegimos por ejemplo el contador C0 normal abierto, cuando este contador alcance su valor se cerrará.
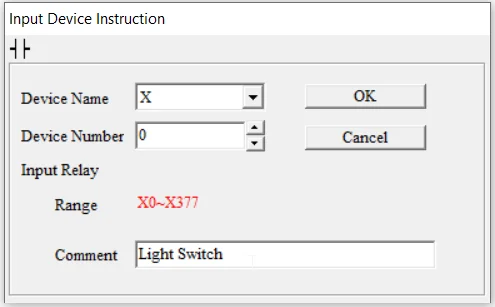
Todo esto lo iremos viendo más adelante, por ahora simplemente voy a elegir la entrada X0 para el contacto normal abierto, como se ve en la figura 9. Observen que además podemos incluir un comentario para saber qué tipo de contacto es o qué función cumple, tener nuestro programa documentado es muy importante y nos ahorra muchos problemas a largo plazo. Como comentario puse: “Interruptor Luz”.
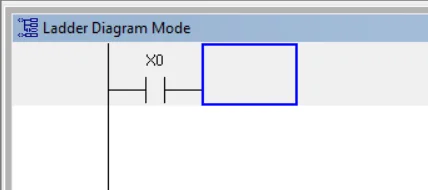
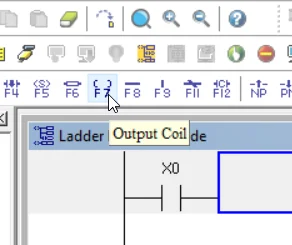
En la figura 10 vemos que se ha agregado nuestro contacto normal cerrado X0 y está conectado a la línea vertical de la izquierda, ahora podemos conectar otro elemento en serie con este contacto X0, en este caso simplemente voy a poner una bobina de salida (figura 11), si excitamos este elemento haremos que la salida física del PLC correspondiente se active.
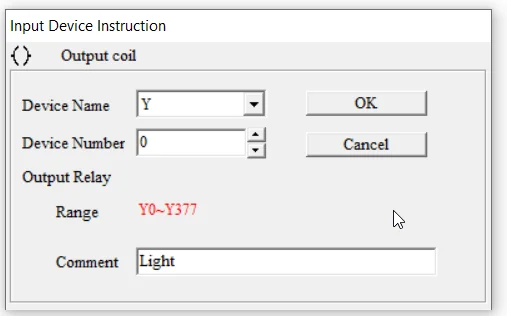
En la figura 12 nos aparece una ventana para seleccionar el tipo de bobina, en este caso voy a seleccionar Y0 y como comentario le pongo “Luz”. Al dar OK el circuito resultante se observa en la figura 13.

Básicamente nuestro programa consistirá en muchas de estas líneas, una debajo de la otra. El PLC evaluará una a una de manera secuencial estas instrucciones y al ejecutar la última instrucción volverá a comenzar.
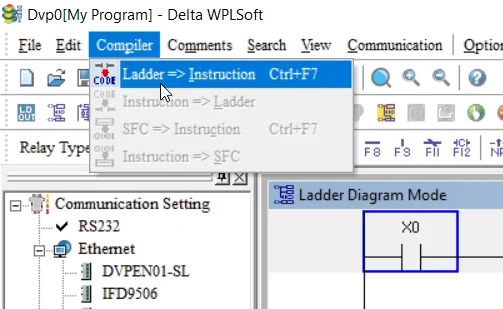
En el proceso de compilación se verifica si no hay inconsistencias en el programa y se traduce el diagrama de Ladder a instrucciones de máquinas.
Para compilar vamos a la pestaña «Compiler» y hacemos clic en la opción: «Ladder => Instruction» o con el acceso rápido Ctrl+F7, figura 14.
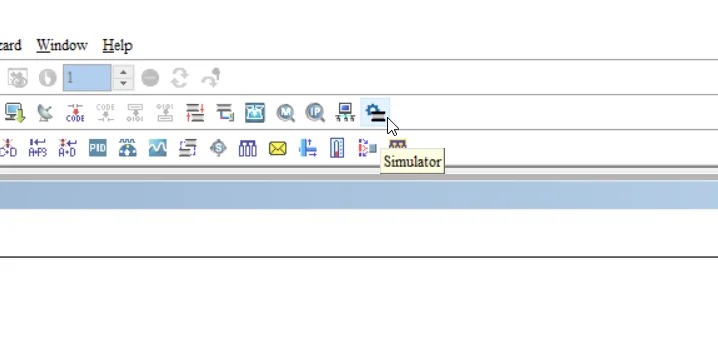
Ahora vamos a simular el funcionamiento del programa en un PLC Delta utilizando el simulador de WPLSoft, para activarlo primero hacemos clic en el ícono que se observa en la figura 15.
Luego vamos a activar el modo Online, con esto podemos ver el estado de todas las entradas, marcas y salidas del PLC. El modo Online lo activamos con el ícono que se encuentra seleccionado en la figura 16.
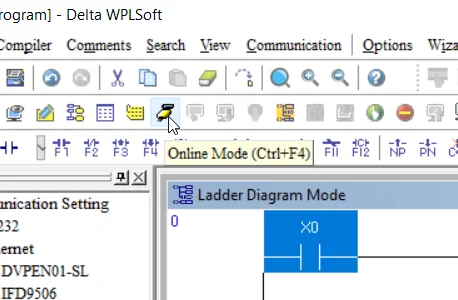
Al pulsar el ícono de modo online nos sale la advertencia de la figura 17.
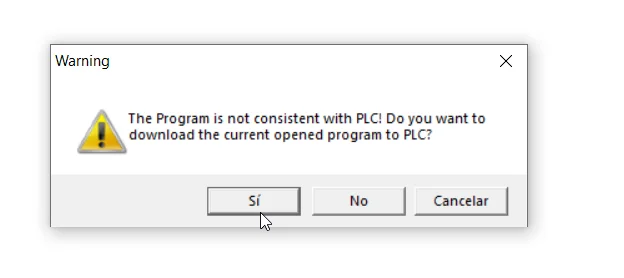
Es muy común encontrar este tipo de advertencias, en este caso nos pregunta si queremos grabar el programa actual al PLC, aceptamos esa y demás advertencias que nos puedan aparecer.
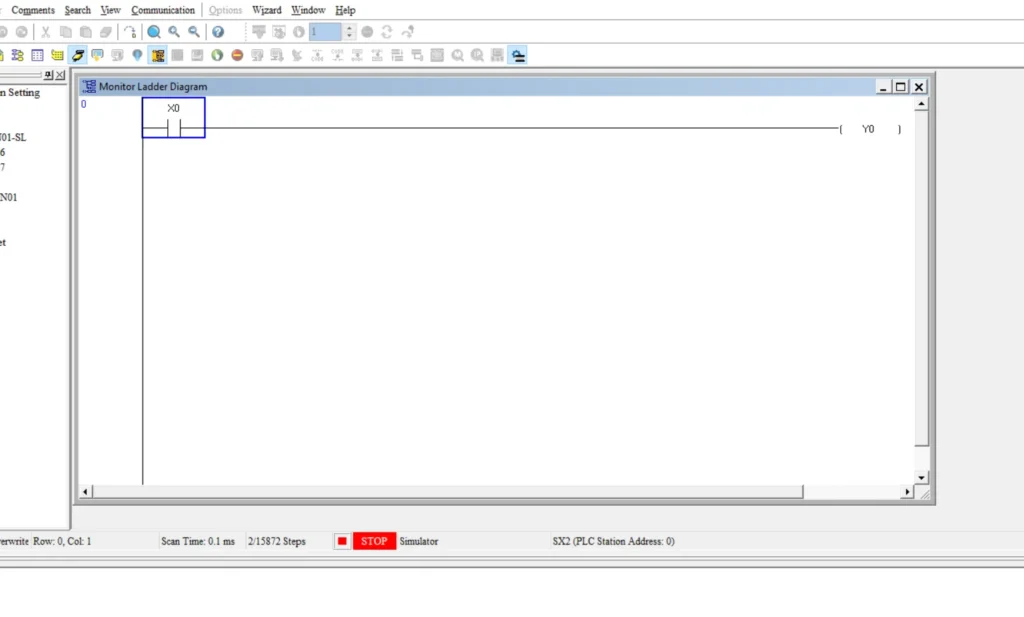
Nos aparece una ventanita que muestra una barra de carga que indica que el programa se está grabando en el PLC. Al terminar vemos que en la ventana Ladder aparece un cartel en rojo que dice que el PLC está detenido (figura 18).
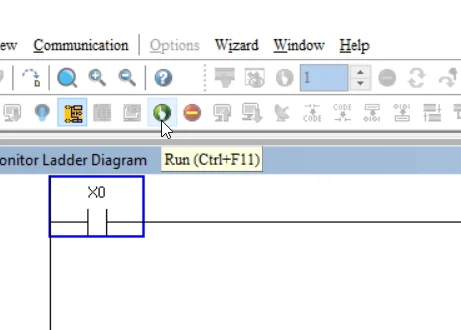
Para poner a funcionar el PLC hacemos clic en el botón Run, seleccionado en la figura 19.
La ADVERTENCIA que nos aparece al momento de poner a funcionar el PLC ES IMPORTANTE!
Ahora se trata de una simulación simplemente, pero si tenemos conectado un PLC real en la computadora y damos la orden de RUN, el PLC arrancará a correr el programa y esto puede significar que las máquinas que esté controlando arranquen sin previo aviso, lo que puede resultar peligroso si hay operarios cerca de ellas.
Hacemos clic en Si para confirmar la orden de arranque. Ahora vemos que el estado del PLC pasó a ser RUN, figura 21.
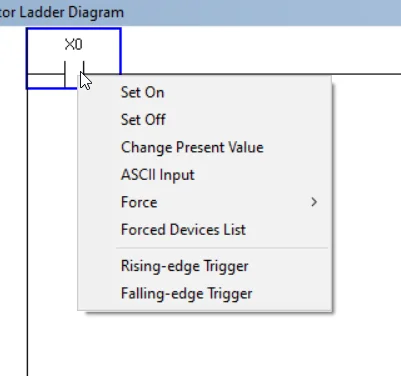
Como se trata de un PLC virtual podemos modificar el estado de la entrada X0 haciendo Clic derecho y eligiendo la opción «Set On».
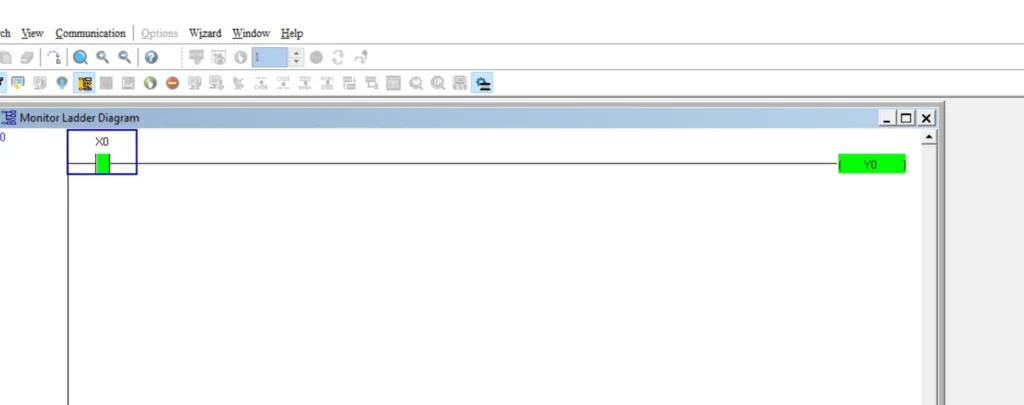
En la figura 23 vemos que el estado del contacto X0 es cerrado y eso implica que la salida Y0 está encendida.
Recuerden que los programas se pueden guardar para poder seguir trabajando en ellos más adelante.
Hemos visto cómo crear desde cero un programa simple para un PLC Delta usando WPLSoft. Empezando por crear un nuevo archivo, eligiendo el PLC que vamos a usar y viendo las ventanas y algunas herramientas.
Vamos a utilizar el diagrama Ladder en el que aplicamos lógica de contactos para construir nuestro programa. El PLC evaluará todas las líneas que agreguemos de manera secuencial, al terminar de evaluar todas las instrucciones volverá a empezar.
Vimos cómo compilar y simular el programa, siendo necesario activar el simulador, entrar en el modo Online y darle la orden de arranque al PLC, es importante prestar atención cuando se dá esta orden porque puede resultar peligroso si estamos trabajando con un PLC real.
Cuando estamos simulando podemos forzar estados en los contactos.
En este artículo vemos un programa para PLC Delta para lograr el arranque y parada por pulso de una salida, utilizando un flanco ascendente en la entrada.
Vamos a utilizar el software WPLSoft para programar el PLC Delta, si aún no sabes cómo usar el software, puedes leer este artículo introductorio sobre cómo programar un PLC Delta con WPLSoft o ver este video.
Un flanco ascendente o descendente ocurre cuando una entrada o salida cambia de estado. Si se pasa del estado apagado al encendido se trata de un flanco ASCENDENTE, si se pasa del estado encendido al apagado es un flanco DESCENDENTE.
En la figura 1 se muestra el Ladder que resuelve el problema, vemos que tenemos un pulso de flanco ascendente en la entrada X0 conectada a la bobina M0 (una marca auxiliar). Luego la bobina de la salida Y0 está conectada a dos ramas en paralelo, una es con el contacto normal abierto M0 y el contacto normal cerrado Y0 y la segunda rama es con el contacto normal cerrado M0 y el contacto normal abierto Y0.
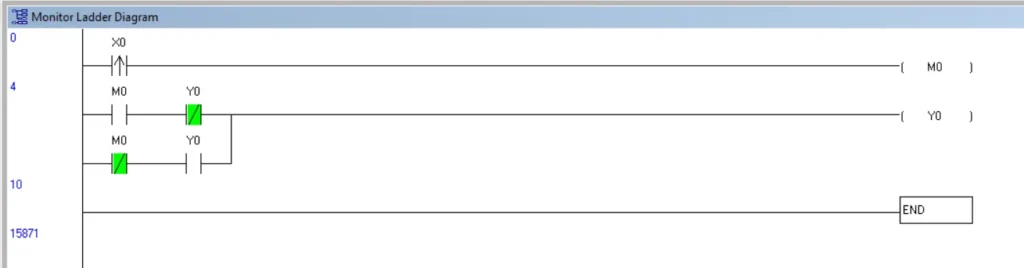
Para empezar, el flanco ascendente de la entrada X0 produce un pulso único en M0, si tenemos un botón conectado a X0, el flanco ascendente se va a producir siempre que presionemos el botón.
Si la salida Y0 se encuentra apagada, como en el caso de la figura 1, un pulso en M0 provocará que se encienda la salida Y0, debido a que la señal circula por la rama superior en la figura 1, es decir por el contacto NO M0 (normally open, normal abierto) y por el contacto NC Y0 (normally closed, normal cerrado).
Luego de que se apaga la marca M0 porque ya no tenemos un flanco ascendente, la salida Y0 permanecerá encendida debido a que se realimenta desde la segunda rama del circuito, como vemos en la figura 2.
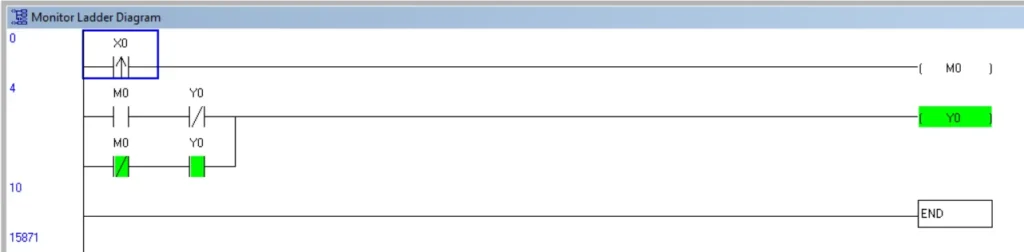
Al proporcionar un nuevo flanco ascendente en la entrada, activaremos momentáneamente la marca M0, lo que abrirá la segunda rama del circuito y la salida Y0 se apagará. Cuando la señal del flanco ascendente desaparece, la salida Y0 permanecerá apagada.
En este artículo vamos a crear un programa para un PLC Delta que active o desactive una salida utilizando una botonera de arranque/parada.
Vamos a utilizar el software WPLSoft para programar el PLC Delta, si aún no sabes cómo usar el software, puedes leer este artículo introductorio sobre cómo programar un PLC Delta con WPLSoft o ver este video.
La botonera consiste en dos botones, en general uno de color verde con un contacto normal abierto y otro de color rojo con un contacto normal cerrado.


Fig. 1: Ejemplos de botonera con arranque y parada.
Se utiliza un contacto normal cerrado para la parada ya que sirve para la retención de la señal de comando, es decir para que la propia tensión aplicada a la bobina se realimente y mantenga el contacto cerrado.
En este caso no es necesario cablear la realimentación de la salida del PLC, podemos enviar tensión de comando a ambos contactos y conectarlos a las entradas X0 y X1 y la retención formará parte de la lógica del programa.
El diagrama Ladder del programa que resuelve este problema se ilustra en la figura 2, vemos que se utilizan dos entradas, X0 y X1 y la salida Y0.

Al encender la entrada X0 se ejecutará la función SET Y0, la cual encenderá la salida Y0.
En la segunda línea del Ladder tenemos la retención, la cual se implementa realimentando la salida Y0 en serie con un contacto normal abierto X1 y esto conectado a la bobina de Y0.

La tensión a la entrada X1 llegará a través del contacto normal cerrado de la botonera y al pulsarlo se interrumpirá, apagando la salida Y0.
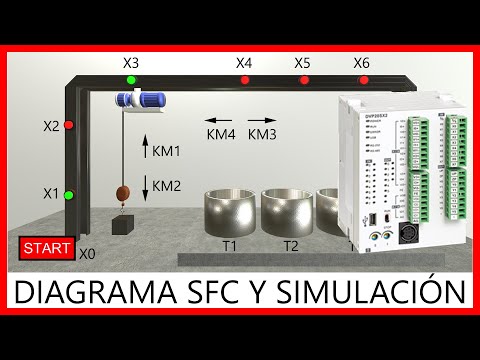
Vamos a crear un sistema de automatización para un proceso que consiste en una pieza que se le va aplicando un tratamiento en distintas etapas.
Haz clic aquí para probar la simulación del proceso de tratamiento
En el siguiente vídeo se describe la consigna del ejercicio a resolver.

En la figura 1 vemos un esquema del ejercicio a implementar, se trata de un proceso de tratamiento de superficies contra la oxidación.
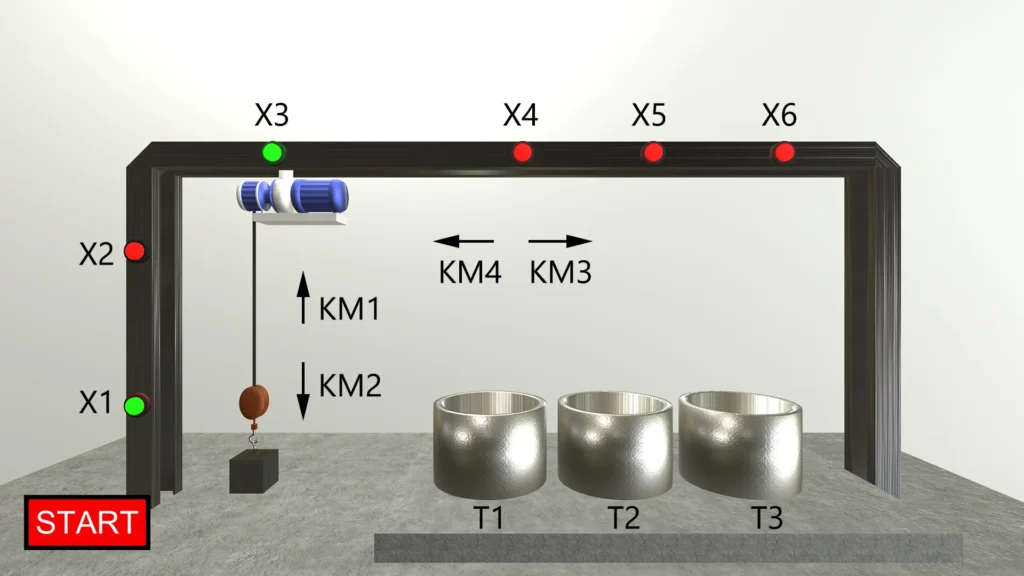
Tenemos una entrada X0 para el botón Start. Los sensores vamos a nombrarlos con la letra X y van desde el 1 al 6. Las bobinas de control de los motores se van a nombrar KM del 1 al 4.
A continuación se pueden descargar el programa resuelto, consiste en un archivo para abrir en el Software WPLSoft.
En matemáticas, una matriz es una estructura que contiene datos numéricos ordenados en filas y columnas, una de sus principales utilidades es representar y resolver sistemas de ecuaciones lineales.
En este artículo vamos a ver cómo representar una matriz y cargarle datos en lenguaje C# en el software Unity.
Para este ejemplo se va a utilizar el motor Unity, se crea un Script C# y se lo asigna a un GameObject presente en la escena, al pulsar el botón Play, Unity ejecutará automáticamente algunas funciones dentro del Script.
Las matrices tienen un cierto número entero de filas y columnas, por lo tanto vamos a necesitar dos números enteros, llamémoslos «rows» (filas) y «columns» (columnas).
Para declarar la matriz en programación utilizaremos arrays bidimensionales y debemos indicar el tipo de dato, por lo general vamos a trabajar con el conjunto de los números reales, así que el tipo de dato que vamos a usar es el «float». Sin embargo podríamos definir matrices de cualquier tipo de dato que se necesite, por ejemplo «bool», «int», «double», «string», etc.
La declaración de los datos necesarios quedaría de la siguiente manera:
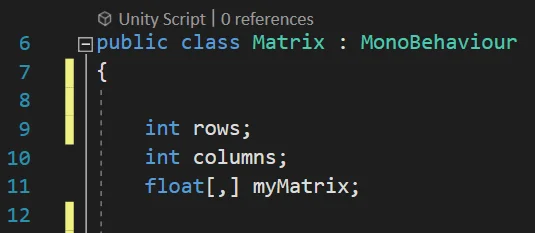
Para declarar un array bidimensional se utilizan los corchetes y se coloca una coma por cada dimensión extra que se necesite, en este caso como necesitamos dos dimensiones queda así: «[ , ]».
En el paso anterior declaramos las variables necesarias, ahora toca inicializar esas variables, es decir darle valores concretos o crear estructuras de datos y asignarlas. La inicialización la haremos en el método «Start» del Script, la función Start y Update se definen automáticamente al crear un nuevo Script. Al pulsar el botón de Play en Unity se ejecutarán automáticamente las funciones Start de todos los Scripts que estén en la escena antes de que aparezca el primer frame del programa. Para más información sobre métodos en programación consultar este vídeo.
En la figura 2 vemos un ejemplo de la inicialización de una matriz de 2×2, en las líneas 17 y 18 está la inicialización de las filas y columnas respectivamente. En la línea 20 se crea un array bidimensional indicando el número total de elementos de cada dimensión y este arreglo se lo asigna al campo «myMatrix» que se declaró en el paso anterior.
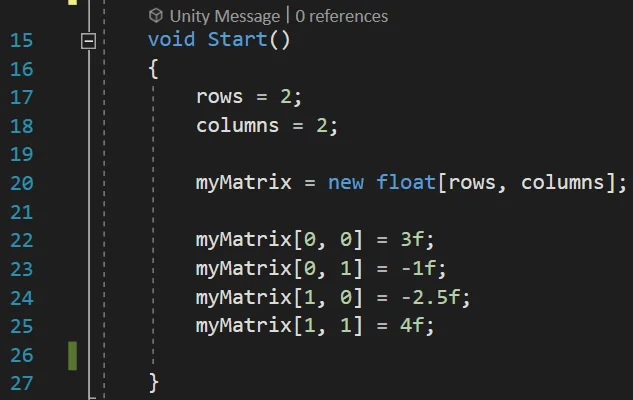
En C# el primer elemento de los arrays es el 0 y el último es «n-1», donde n es el tamaño del array, entonces en la línea 22 por ejemplo, el dato en la posición [0,0] hace referencia al elemento en la primera fila y primera columna.
Hemos visto cómo declarar arrays bidimensionales que se pueden utilizar para representar matrices y posteriormente realizar operaciones entre ellas.
En este ejemplo se utilizó el tipo de dato «float» para declarar la matriz, lo que quiere decir que cada elemento tendrá almacenado un número con punto decimal, pero se podrían definir matrices de cualquier tipo de dato que se necesite, por ejemplo «bool», «int», «double», «string».
Para leer o modificar un elemento dentro de la matriz se utiliza el nombre con el que se la definió y entre corchetes se indica la fila y la columna separadas por coma, así por ejemplo si escribimos «myMatrix[1,0]» estamos apuntando al elemento de la matriz que está en la segunda fila, primera columna.











































































